

Motor control method based on iterative learning adaptive MIT controller
A technology of iterative learning and iterative control, applied in the field of motor control based on iterative learning adaptive MIT controller, to achieve the effect of changing dynamic performance, maintaining system stability and maintaining independence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
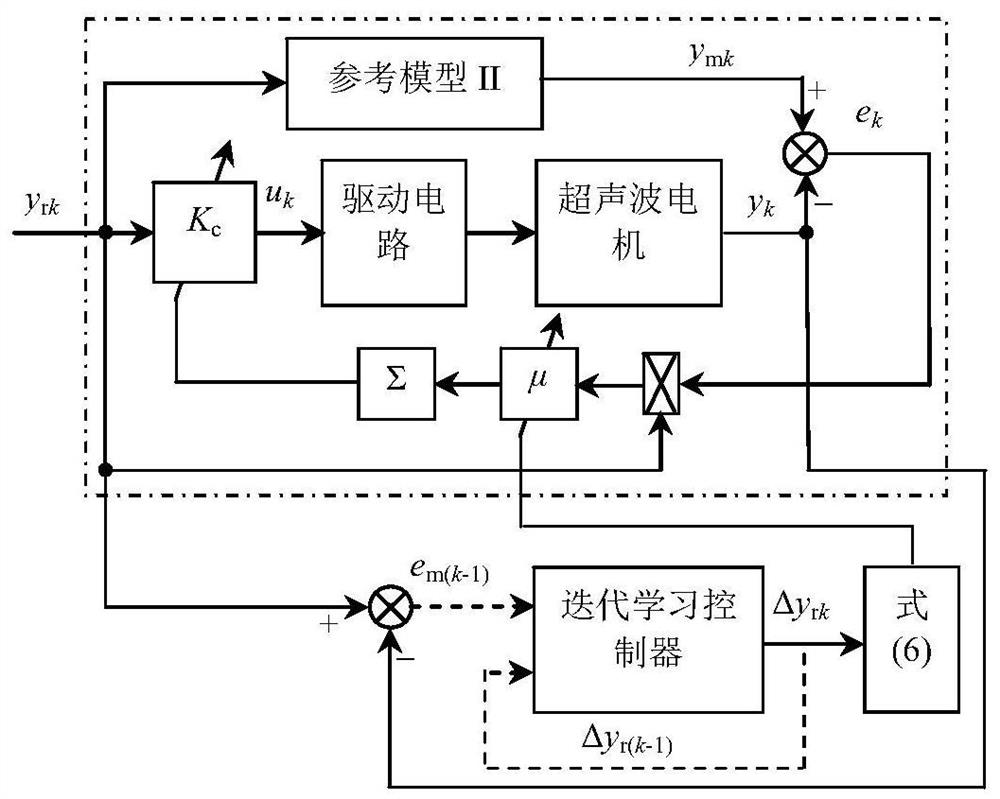
[0032] The basic idea of the present invention is: the present invention borrows the idea of iterative learning control, combines the iterative learning controller and the MIT controller, and uses the iterative learning controller to automatically adjust the adaptive gain μ in the MIT adaptive law online, so as to compare A small design and implementation complexity cost is exchanged for a significant increase in the performance of the MIT controller.
[0033] A motor control method based on iterative learning adaptive MIT controller of the present invention will be described in detail below with reference to the drawings and embodiments.
[0034] Method example:
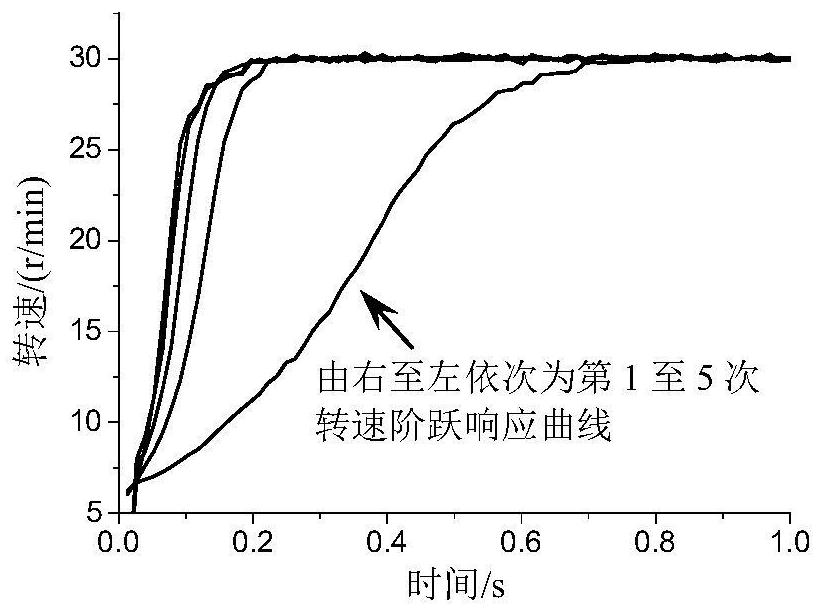
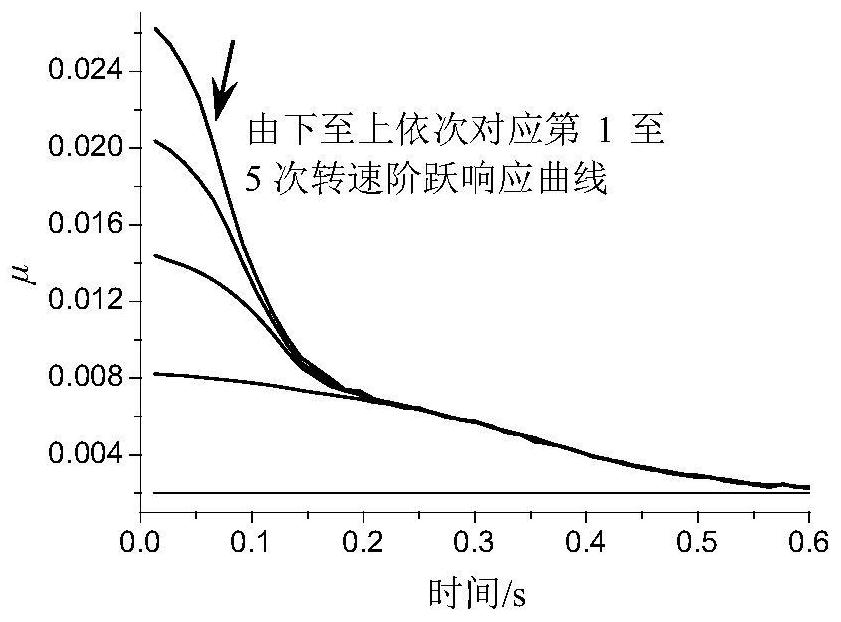
[0035] An embodiment of a motor control method based on iterative learning adaptive MIT controller of the present invention, the control block diagram of the closed-loop control system of the speed of the ultrasonic motor realized by combining the iterative learning controller and the MIT controller is as follow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More