Multi-constraint planet landing trajectory vector planning method
A multi-constraint and planetary technology, applied in the field of deep space exploration, to reduce the complexity of the solution, ensure real-time performance and convergence, and improve the ability to avoid obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0103] Example 1: Minimum time-of-flight atmospheric entry trajectory planning problem
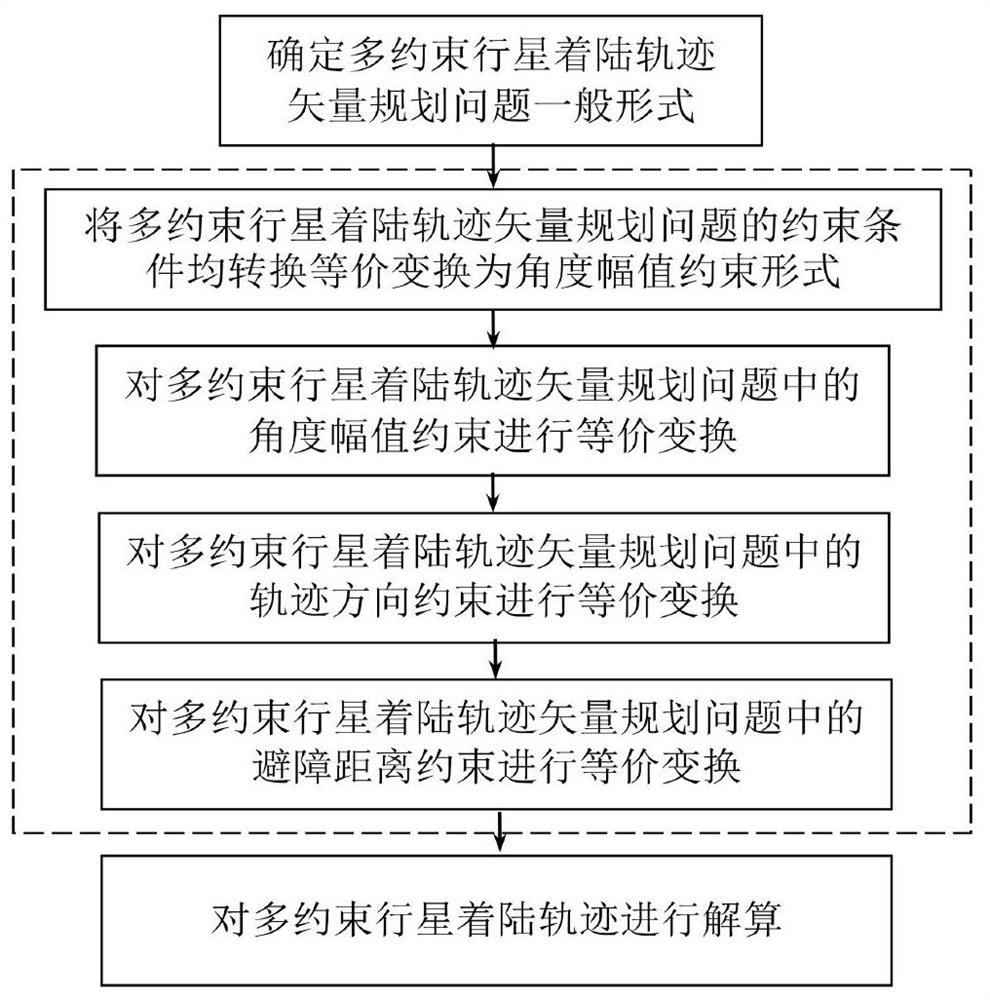
[0104] Such as figure 1 As shown, the multi-constraint planetary landing trajectory vector planning method disclosed in this embodiment, the specific implementation steps are as follows:
[0105] Step 1. Determine the dynamic equation, performance index and constraint conditions of the minimum flight time atmospheric entry trajectory planning problem.
[0106] In the trajectory planning problem of planetary atmosphere entry, the aircraft is in the high-speed gliding stage, and the flight altitude is approximately constant. Therefore, only the trajectory planning problem in the horizontal plane is considered. The dynamic equation of planetary atmosphere entry trajectory planning problem is
[0107]
[0108] in, is the state vector, r=[x,y] T is the position vector of the entering aircraft, v is the speed of the aircraft, and θ is the heading angle; is the roll angle of the aircra...
Embodiment 2
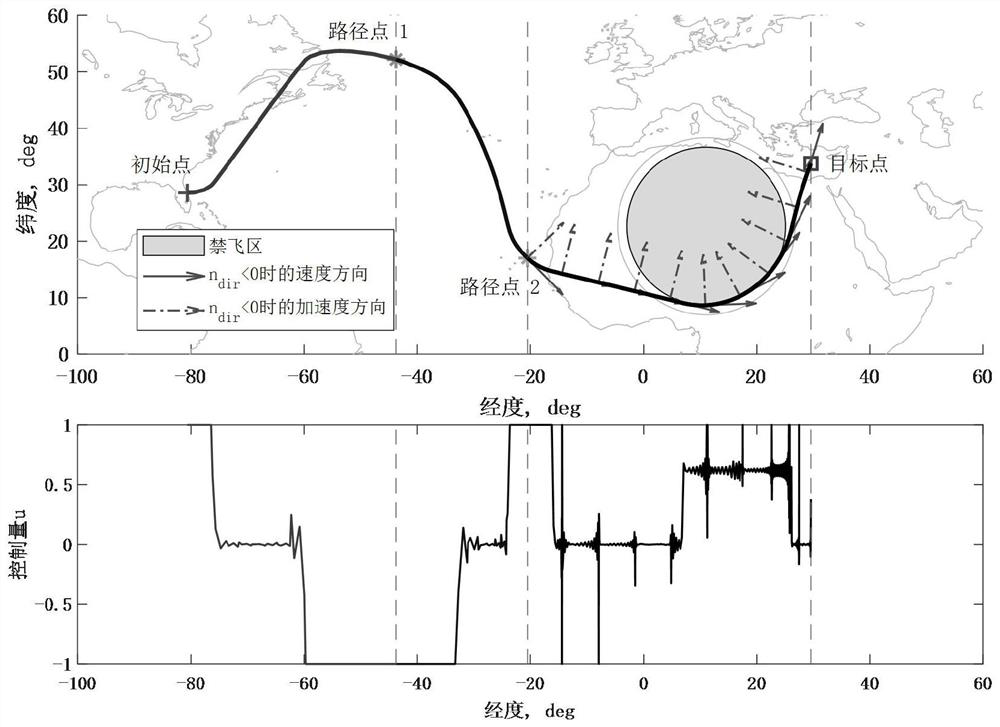
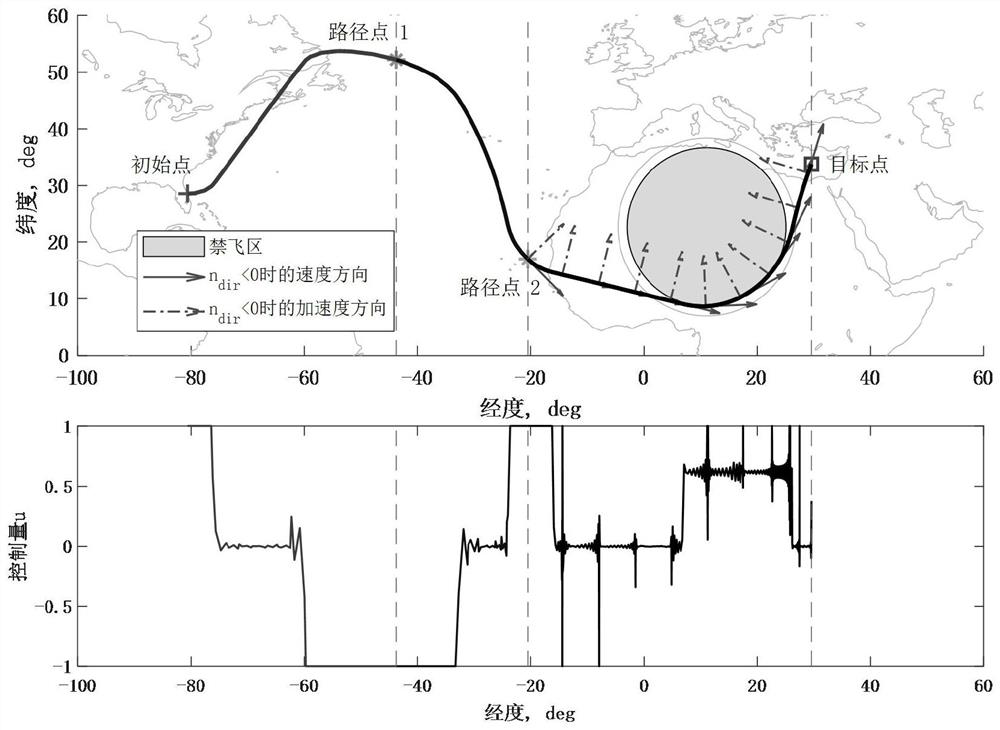
[0137] Example 2: Optimal fuel consumption power descent obstacle avoidance trajectory planning problem
[0138] Such as figure 1 As shown, the multi-constraint planetary landing trajectory vector planning method disclosed in this embodiment, the specific implementation steps are as follows:
[0139] Step 1. Determine the dynamic equations, performance indicators and constraints of the trajectory planning problem of optimal fuel consumption power descent obstacle avoidance.
[0140] The dynamic equation of the trajectory planning problem for optimal fuel consumption power descent obstacle avoidance is
[0141]
[0142] Among them, r, v, m are the position vector, velocity vector and mass of the aircraft respectively; g P is the gravitational acceleration vector of the target planet; a C is the control acceleration vector; I sp is the thruster specific impulse; g E is the gravitational acceleration at the sea level of the earth, T=ma C Thrust for the thruster.
[0143...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More