Fixed-time relative attitude and orbit tracking control method under error constraint
A fixed-time, tracking control technology, applied in attitude control, non-electric variable control, control/regulation systems, etc., which can solve the problem of difficult to obtain accurate models, difficult to obtain dynamic models, and uncertain parameters such as spacecraft mass and moment of inertia. and other problems to achieve the effect of improving the robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
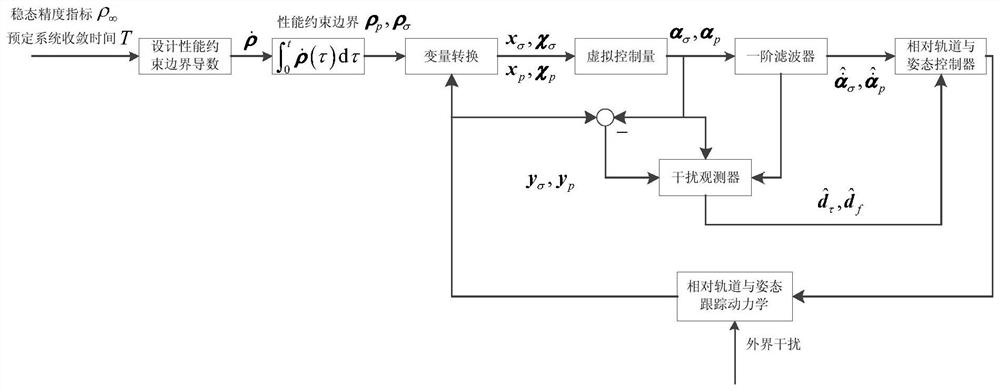
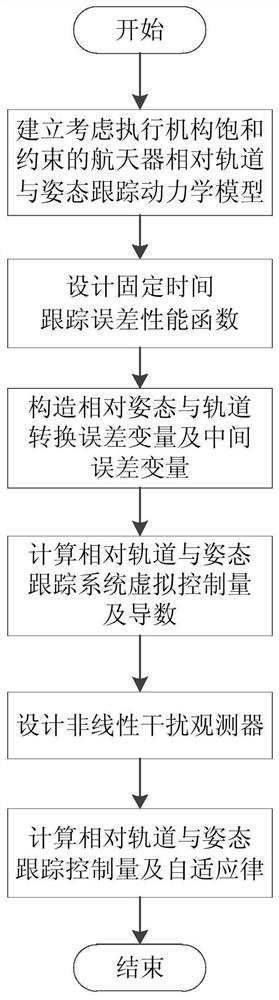
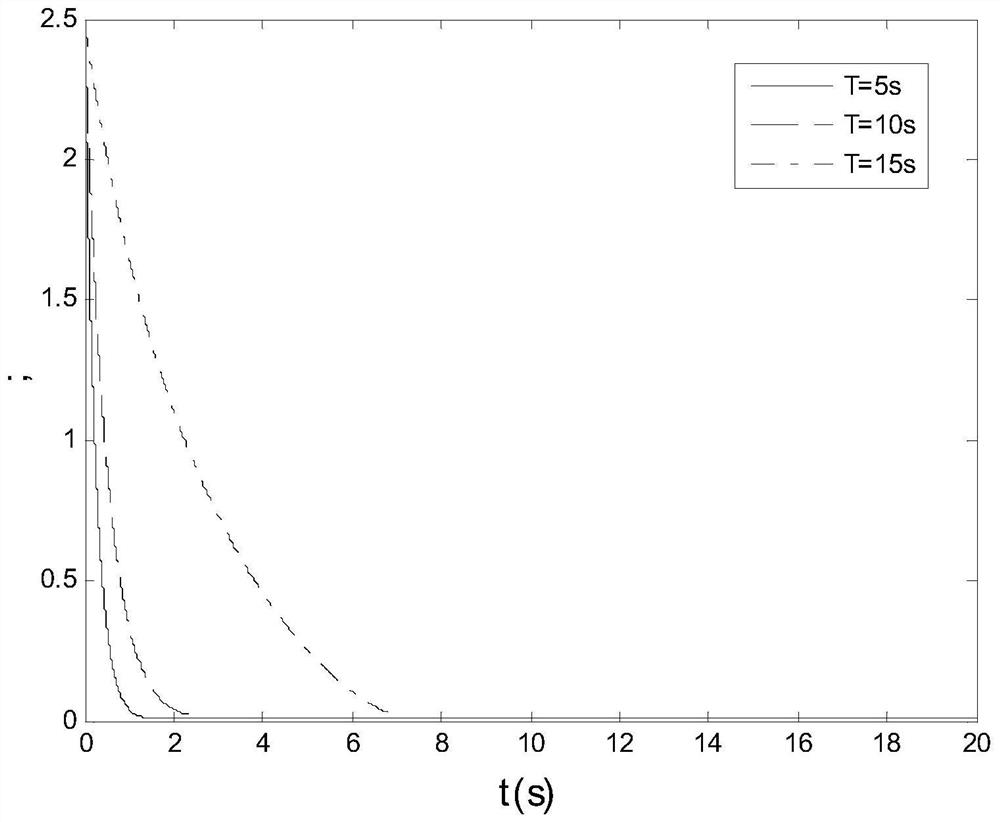
[0082] A fixed-time relative attitude-orbit tracking control method under error constraints, combined with the concept of fixed-time stability, explicitly gives the time when the relative orbit and attitude tracking errors converge to the steady-state boundary constraints, that is, the pre-setting of the convergence time is realized At the same time, compared with the traditional preset performance control method, the relative attitude tracking error can be guaranteed to have the expected dynamic and steady-state performance without the error transformation function. The specific steps are as follows:
[0083] (1) Establish a six-degree-of-freedom rendezvous and docking model between the tracking spacecraft and the target spacecraft, including the relative orbit and relative attitude tracking control kinematics and dynamics models between the two spacecraft;
[0084] Among them, the relative attitude tracking kinematics and dynamics models of the tracking spacecraft and the tar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com