

Tower inspection route design method
A route design and pole tower technology, which is applied in three-dimensional position/channel control, vehicle position/route/height control, instruments, etc., can solve the problems of inconsistent order of aerial photography points on inspection routes, low level of intelligence, aerial image naming, etc. , to achieve the effect of reducing the workload of manual intervention, improving the level of intelligence, improving efficiency and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
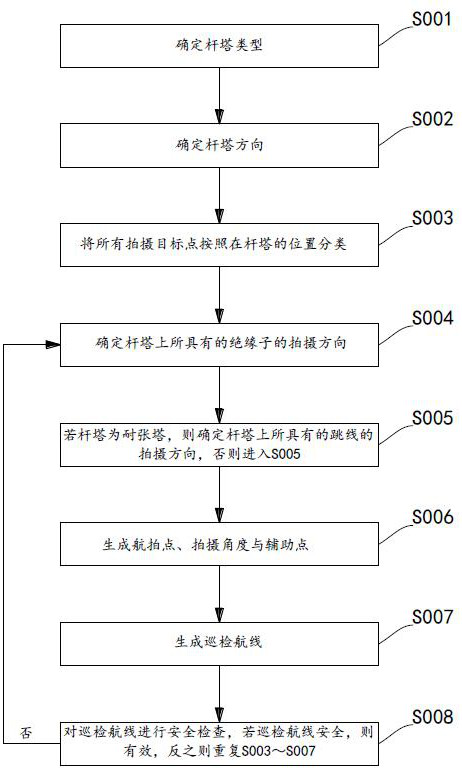
[0064] Such as figure 1 As shown, a method for designing a tower inspection route includes the following steps:
[0065] S001, determine the tower type;
[0066] S002. Determine the direction of the tower;
[0067] S003, classify all shooting target points according to their positions on the tower;
[0068] S004. Determine the shooting direction of the insulators on the tower;
[0069] S005. If the tower is a strain-resistant tower, determine the shooting direction of the jumper on the tower, otherwise go to S006;
[0070] S006. Generate aerial photography points, shooting angles and auxiliary points;
[0071] S007, generate the inspection route;
[0072] S008. Carry out a safety check on the inspection route. If the inspection route is safe, it is valid; otherwise, repeat S003-S007.
Embodiment 2
[0074] This embodiment is a further improvement on the basis of embodiment 1, specifically as follows:
[0075] For step S002, it is specifically:
[0076] According to the attribute information of the shooting target point, the coordinates of the left and right ground points on the tower are obtained, and the direction of the tower is obtained by calculating the coordinates of the left and right ground points.
Embodiment 3
[0078] This embodiment is a further improvement on the basis of embodiment 1 or 2, specifically as follows:
[0079] S003 is specifically:
[0080] Through azimuth calculation, the shooting target point on the left side of the left ground line is set as the left point of the tower, the shooting target point between the left and right ground lines is set as the middle point, and the point on the right side of the right ground line is set as the right point of the tower. After the points are classified according to the position of the tower, the aerial photography point of the optimal route can be designed according to the position of the shooting target point, so as to improve the inspection efficiency.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More