

Unmanned aerial vehicle cooperative communication method for joint optimization of power and three-dimensional trajectory
A joint optimization, three-dimensional trajectory technology, applied in the field of UAV, can solve the problem of UAV communication system vulnerable to eavesdropping, and achieve the effect of improving the security of the physical layer
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
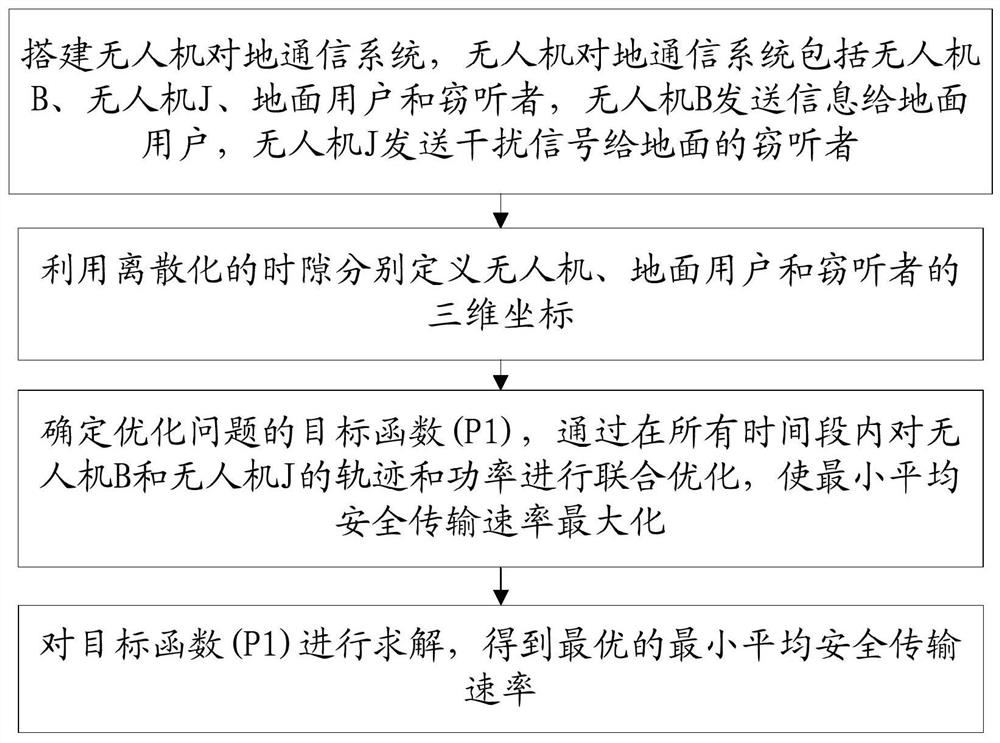
[0089] Such as figure 1 As shown, a kind of unmanned aerial vehicle cooperative communication method of joint optimization of power and three-dimensional trajectory of the present invention comprises:
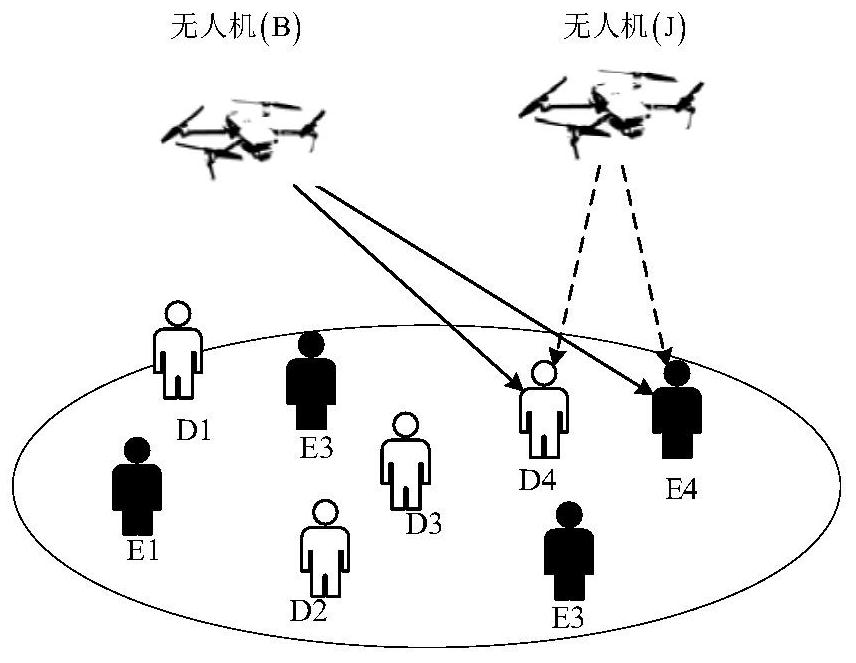
[0090] Step 1, build the UAV-to-ground communication system, the UAV-to-ground communication system includes UAV B, UAV J, ground users and eavesdroppers, and the UAV B sends information to ground users, The UAV J sends a jamming signal to the eavesdropper on the ground, and uses D m represents the mth ground user, with E k Denotes the kth eavesdropper, Use T to represent the entire flight cycle of the UAV, discretize T, and divide it into N small communication time slots δ t , namely T=Nδ t ; In order to simplify the complexity of the system, the entire communication process T is discretized and divided into N small communication time slots δ t , namely T=Nδ t . Compared with the flight speed of UAV, the communication time slot δ t The time length is very small, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More