

Method for optimized autonomous driving of vehicle
A technology for autonomous driving and vehicles, applied in the direction of vehicle components, other vehicle parameters, vehicle status input parameters, etc., can solve problems affecting the trajectory, and achieve the effect of optimizing the trajectory characteristics and optimizing the trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
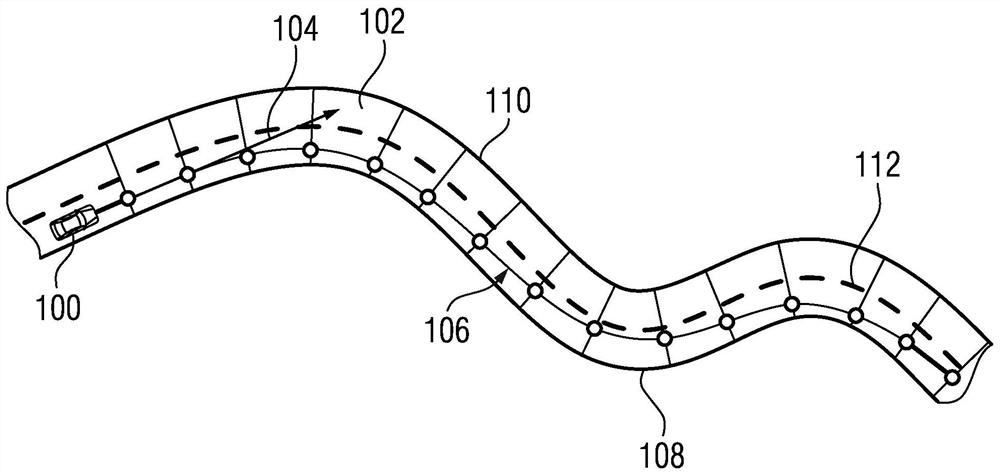
[0035] figure 1 A schematic diagram of a lane 102 for autonomous driving of a vehicle 100 is shown. In the example, vehicle 100 is moving forward in direction of travel 104 . exist figure 1 A trajectory 106 for driving on lane 102 is shown in . Trajectory 106 is one of several possible trajectories by means of which vehicle 100 can move on lane 102 . In this example, a tangent to trajectory 106 gives direction of travel 104 . Trajectory 106 begins directly in front of vehicle 100 .
[0036] Lane 102 is bounded by lane boundary lines. In this example, a right boundary line 108 arranged on the right side of the trajectory 106 relative to the direction of travel 104 and a left boundary line 110 arranged on the left side of the trajectory 106 relative to the direction of travel 104 are shown. In this example, the central isolation strip 112 extends in the middle with respect to these side boundary lines. Lane boundaries can optionally be defined by the side boundaries or by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More