

Clamping device and method for controlling clamping force on workpiece through linear motor
A linear motor and clamping device technology, applied in the direction of manufacturing tools, chucks, manipulators, etc., can solve problems such as inaccurate clamping force, complex structure, and easy damage to the motor, and achieve high-precision motion control and high-response motion control , the effect of precise clamping force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
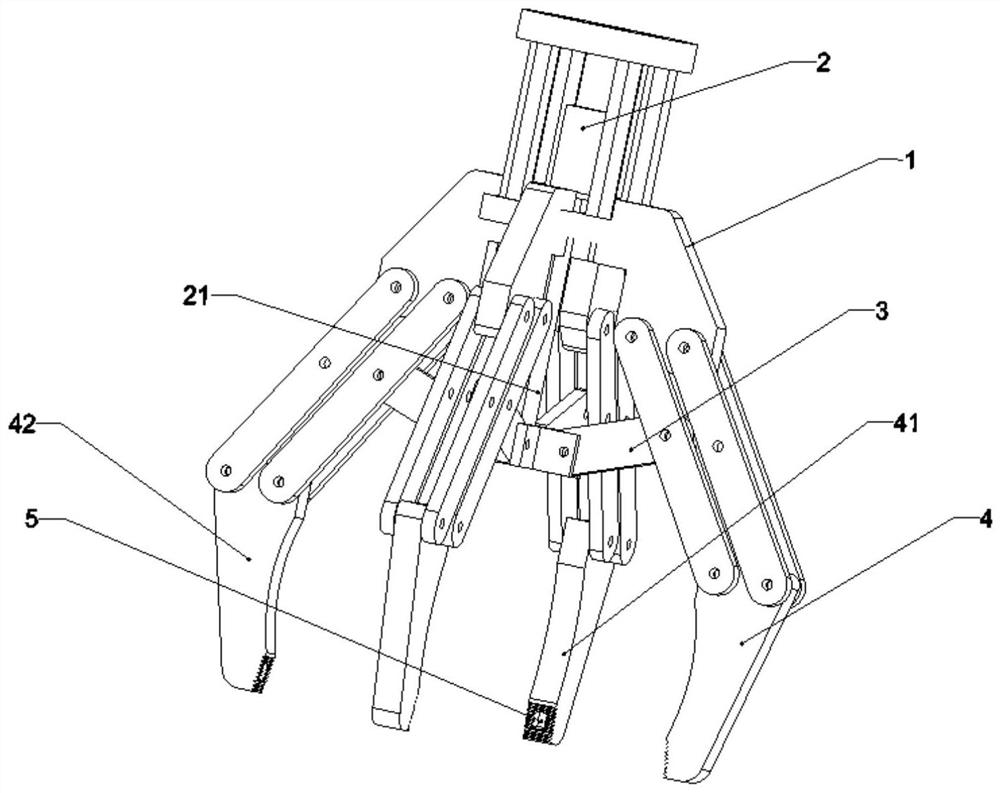
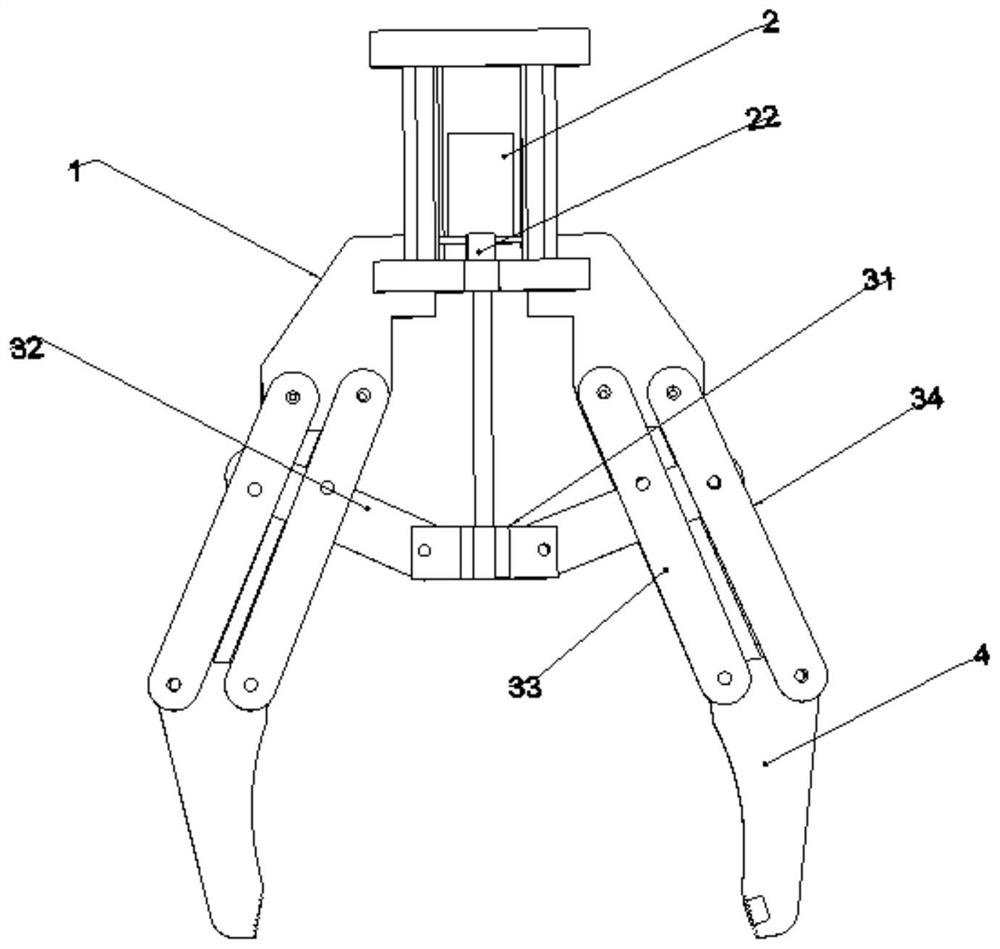
[0029] like figure 1 and figure 2 As shown, in the embodiment of the present invention, the clamping device that controls the magnitude of the clamping force on the workpiece by a linear motor includes a base 1 , a linear motor 2 , a telescopic rod 21 , a transmission mechanism 3 and a clamping claw mechanism 4 . The clamping device sends an electric signal through the control unit CPU to drive the telescopic rod 21 to move, and then drives the transmission mechanism 3 to control the opening and closing of the clamping claw mechanism 4 .
[0030] The bottom surface of the base 1 is used to fix the linear motor 2 and the transmission mechanism 3, and the matching bolt holes on the top surface of the base 1 are connected with the required mechanical arm, AGV trolley and other chassis units, and a cylindrical protection is arranged around the base 1. Cover to prevent dust and debris from entering the motor components and causing the clamping device to work abnormally.
[0031]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More