Minimally invasive surgery robot system based on endoscope
A robot system and minimally invasive surgery technology, applied in the field of medical devices, can solve problems such as unstable endoscope clamping and inaccurate endoscope calibration, and achieve the effect of solving the unstable endoscope picture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in further detail below in conjunction with the accompanying drawings and nasal skull base endoscopic surgery as an example.
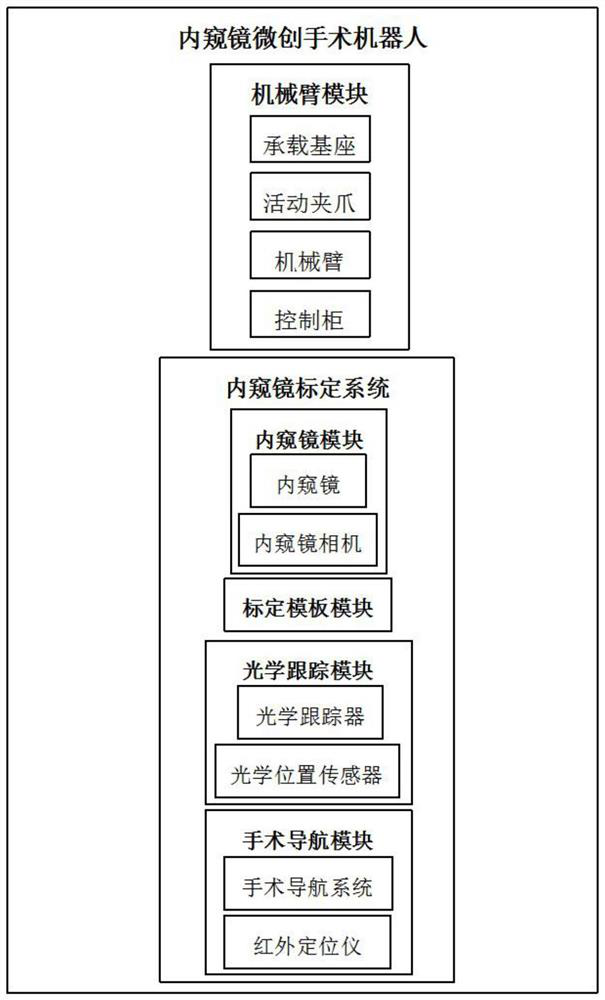
[0026] like figure 1 As shown, the present invention provides a minimally invasive surgical robot system including: a robotic arm module and an endoscope calibration system.
[0027] The manipulator module includes: a bearing base, movable jaws, a manipulator and a control cabinet. The robotic arm module is used to hold the endoscope and adjust the spatial position of the endoscope precisely and flexibly, so that the doctor does not need to hold the endoscope for a long time, freeing the hands of the doctor, and then obtaining stable and precise endoscopy. mirror screen. The carrying base is used to carry the mechanical arm; the movable gripper is installed at the end of the mechanical arm for clamping the endoscope and surgical instruments; the mechanical arm is a 7-axis mechanical arm, and the 7-axis m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More