

Method and system for suppressing steering torque fluctuation for EPS
A steering torque and fluctuation compensation technology, which is applied to steering mechanisms, electric steering mechanisms, power steering mechanisms, etc., can solve problems that affect the driver's driving experience, and achieve the effects of improving quality, suppressing torque fluctuations, and weakening steering torque fluctuations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
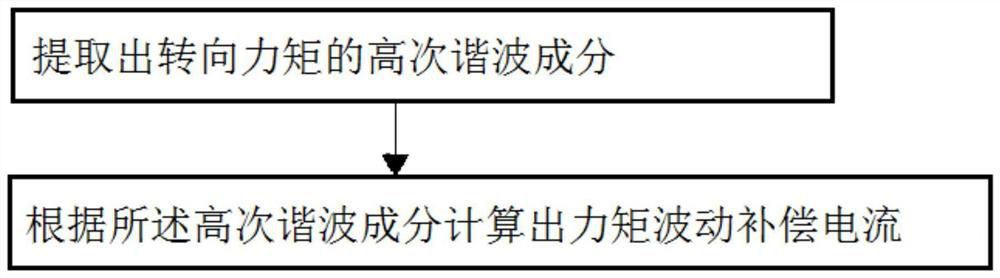
[0040] A method for suppressing fluctuations in steering torque for EPS, such as figure 1 shown, including the following steps:
[0041] Step 1: extract the higher harmonic components of the steering torque;
[0042] Step 2: Calculate the torque fluctuation compensation current according to the higher harmonic component, and multiply the higher harmonic component by a compensation gain to obtain the torque fluctuation compensation current.
[0043] Wherein, the step 1 includes the following steps:
[0044] Step 1.1: collect the angle signal output by the steering wheel at a fixed spatial interval through the rotor position sensor, and use it as a trigger signal;
[0045] Step 1.2: collecting and filtering the steering torque signal according to the trigger signal, so as to obtain the high-order harmonic component.
[0046] In the step 1.2, the steering torque signal is filtered by a harmonic filter, wherein the steering torque signal is a digital signal collected and conver...
no. 2 example
[0088] Other technical features In the same situation as the first embodiment, step 1.1: collect the continuous angle signal of the steering wheel through the rotor position sensor;
[0089] Step 1.2: collecting steering torque signals at fixed time intervals and filtering through a second digital filter;
[0090] Wherein, the second filter is realized by the following formula:
[0091]
[0092] Among them, Y(k)——the output result of this filter;
[0093] Y(k-1)——the output result of the filter last time;
[0094] U(k)——the input of the filter this time;
[0095] U(k-1)——the last input of the filter;
[0096] ω s - the "cut-off harmonic order" of the harmonic filter;
[0097] T s =ΔA / 360, ΔA is the angle difference between two samplings.
[0098] In addition, similar to the definition of the time-domain signal sampling period, the angle-domain sampling period can be defined as the angle difference between two signal samples, that is, the period is the number of signa...
no. 3 example
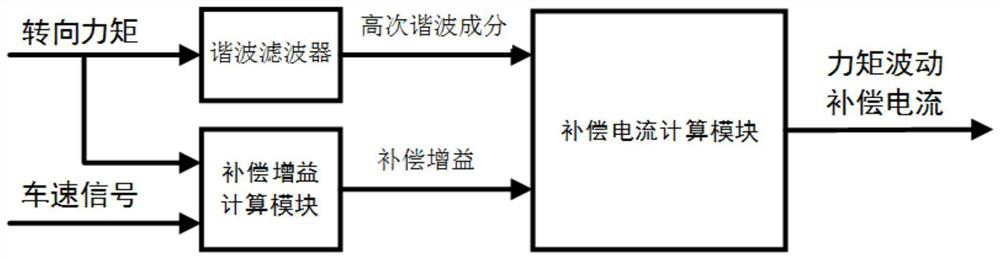
[0100] A system for suppressing fluctuations in steering torque for EPS such as figure 2 As shown, it includes a harmonic filter, a compensation gain calculation module and a compensation current calculation module, wherein the harmonic filter is used to extract the high-order harmonic components of the steering torque, and transmit the high-order harmonic components to the The compensation current calculation module; the compensation gain calculation module determines the compensation gain in the current state according to the vehicle speed signal and the steering torque signal, and transmits the compensation gain to the compensation current calculation module; the compensation current calculation module according to The current high-order harmonic component and compensation gain are used to calculate the current torque fluctuation compensation current.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More