

Submarine cable route coordinate positioning method based on weak magnetic signals
A technology of coordinate positioning and magnetic signal, which is applied in the field of submarine cable positioning, can solve the problems of unable to collect magnetic signals and the distance between the sensor and the submarine cable, etc., and achieve the effect of improving the applicable area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0083] A submarine cable route coordinate positioning method based on a weak magnetic signal, the coordinate positioning method uses an underwater robot as a platform, the bottom of the underwater robot is provided with a horizontal track, and the underwater robot is provided with two or three axis magnetic sensors , characterized in that,
[0084] The two three-axis magnetic sensors are respectively a coil sensor and a fluxgate sensor. The sensitivity of the coil sensor is higher than that of the fluxgate sensor, and the range of the fluxgate sensor is greater than that of the coil sensor. The signal attenuates quickly in seawater, resulting in a very large signal range span as the distance between the detection equipment and the submarine cable changes. The coil sensor is easier to make a high-sensitivity sensor, and the fluxgate sensor is easier to make a large-range sensor. In this embodiment, the coil sensor with higher sensitivity is selected to detect weak signals, and...
Embodiment 2
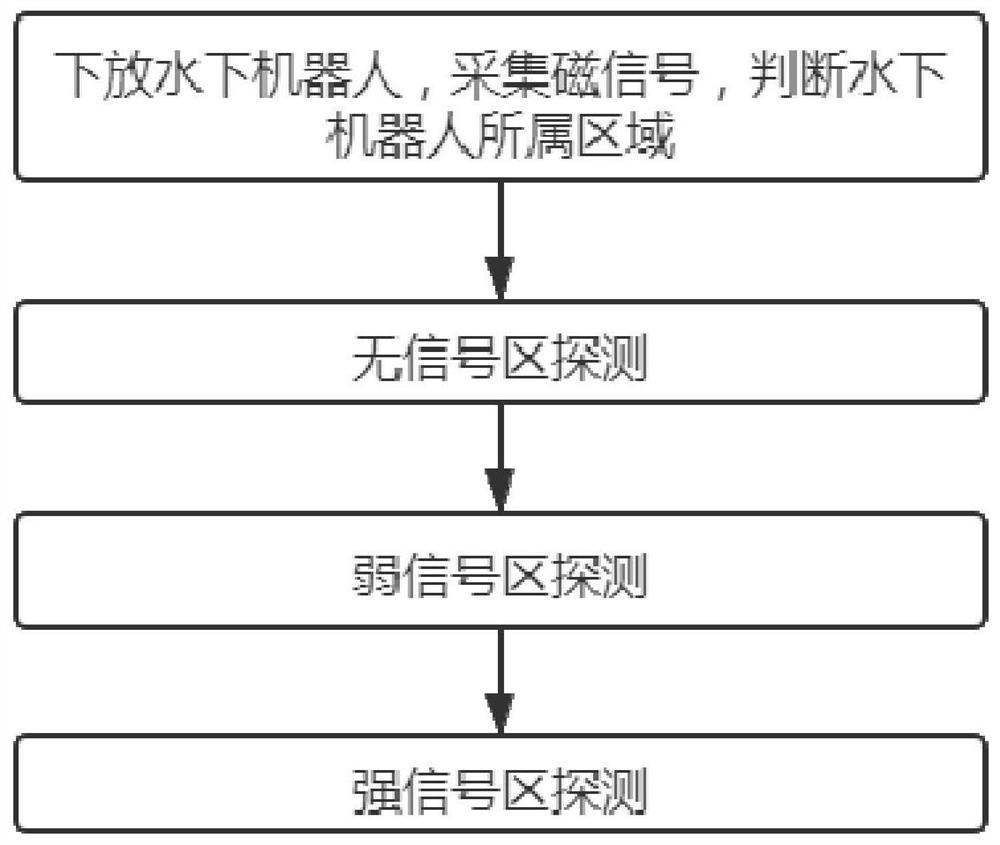
[0095] A submarine cable routing coordinate positioning method based on a weak magnetic signal. On the basis of the first embodiment, when the underwater robot is located in a no-signal area, the no-signal area detection is performed, and the no-signal area detection makes the The underwater robot enters the weak signal area; the no-signal area is the area where the coil sensor cannot collect or can only collect effective magnetic signals on some axes; the weak signal area is that each axis of the coil sensor can collect effective magnetic signals. magnetic signal, and the fluxgate sensor cannot collect or can only collect effective magnetic signal areas on some axes; the effective magnetic signal is that the information contained in the collected signal can be used to analyze the position of the submarine cable; the non- Signal area detection includes the following steps:
[0096] Make the underwater robot descend to a specific height, and collect the magnetic signal ε genera...
Embodiment 3
[0103] A submarine cable routing coordinate positioning method based on a weak magnetic signal. On the basis of the second embodiment, when the underwater robot is located in a weak signal area, the detection of the weak signal area is performed, and the detection of the weak signal area makes the The underwater robot enters the strong signal area; the strong signal area is the area where effective magnetic signals can be collected by each axis of the coil sensor and the fluxgate sensor; the detection of the weak signal area includes the following steps:
[0104] lowering the underwater vehicle to the seabed;
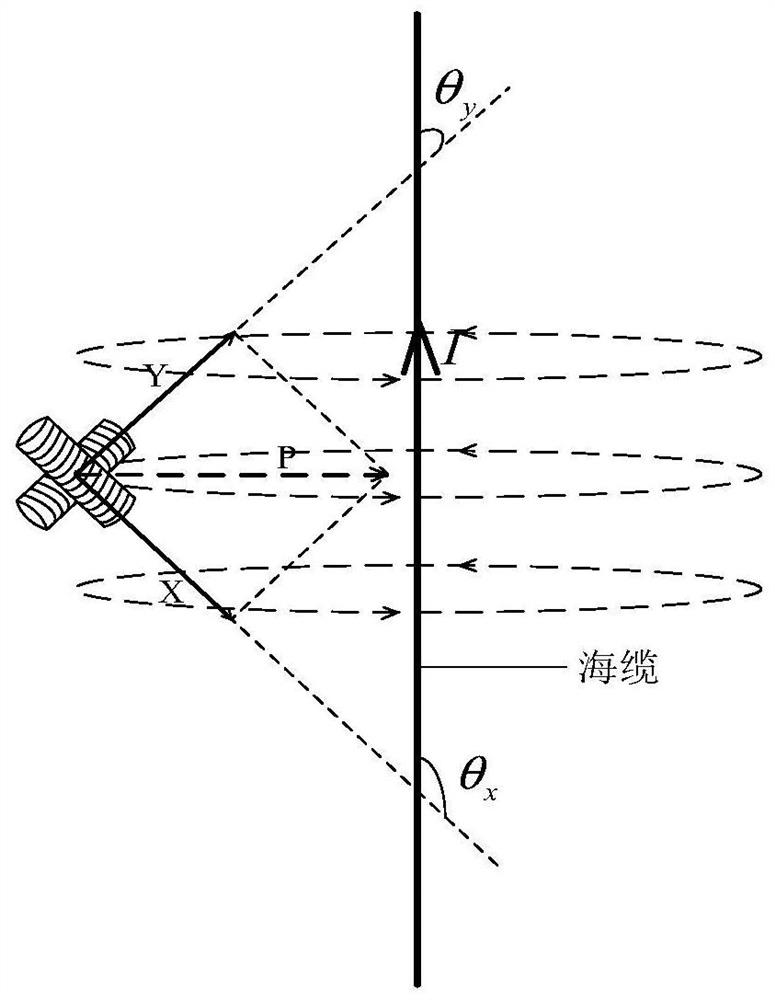
[0105] The magnetic signal ε generated by the submarine cable is collected through the X-axis and Y-axis of the coil sensor 1x and ε 1y , and calculate the angle θ between the Y axis of the coil sensor and the submarine cable route y ,refer to image 3 , the formula is as follows:
[0106]
[0107] According to the angle θ y Adjust the advancing direction of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More