

Power grid inspection robot positioning method based on 5G and Beidou
A technology for robot positioning and power grid inspection. It is used in services based on specific environments, satellite radio beacon positioning systems, positioning and other directions. It can solve the problem of high cost in the later stage and achieve the effect of ensuring accuracy and speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
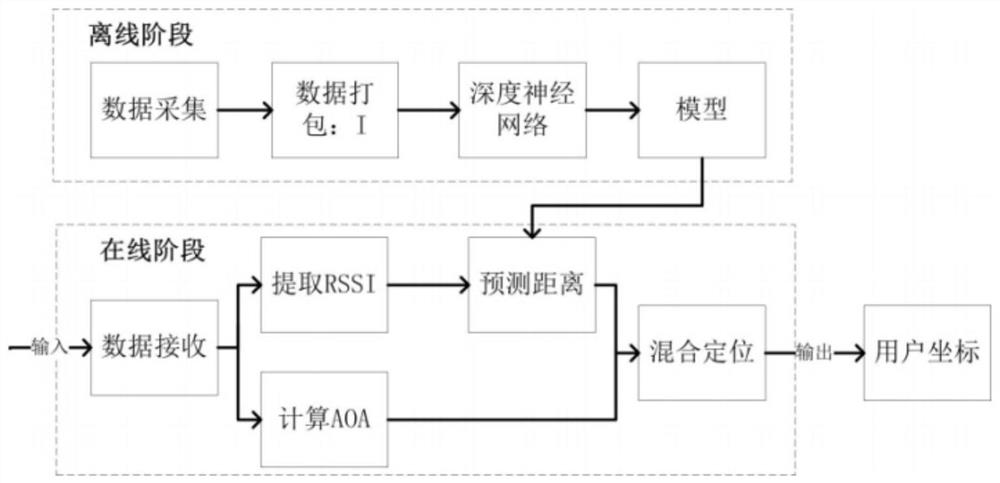
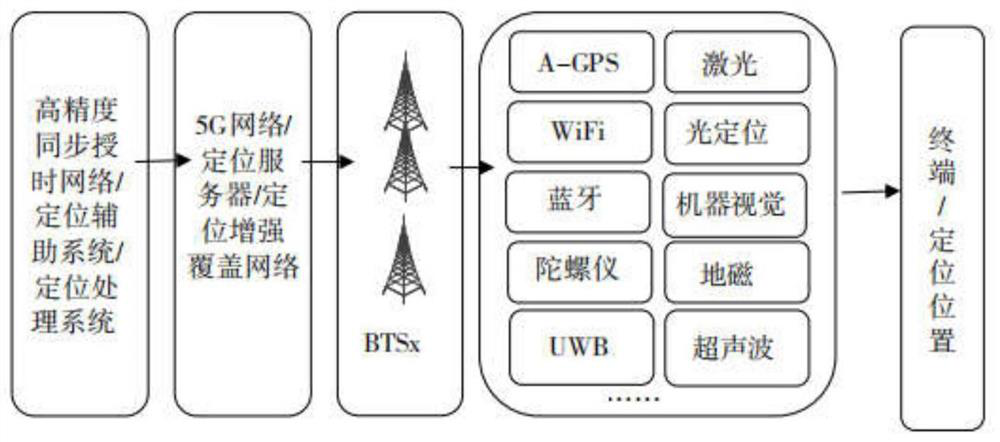
[0032] The present invention can establish a 5G base station on the Beidou ground, which is used to observe and receive Beidou system satellite signals and enhance 5G signals around the base station, so as to realize high-precision positioning covering around the power grid. Specifically, build a large number of 5G base stations in the positioning area to build a 5G network platform with positioning functions. When unknown beacons or inspection robots enter the network, the 5G base station can send different detected information to the integrated information center and feed back the processing results. The 5G network is the carrier of various positioning signals, and the positioning signals can transmit information through the 5G network; specifically, the following steps are included:
[0033] Bui...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More