

Inverse kinematics method for space mechanical arm under single-joint locking failure
A technology of space manipulator and inverse kinematics, which is applied in the field of inverse kinematics solution based on particle swarm algorithm, can solve problems such as not mentioned, iterative incremental calculation is not unique, etc., achieve strong universality, reduce calculation time, The effect of reducing the time to converge to the optimum
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
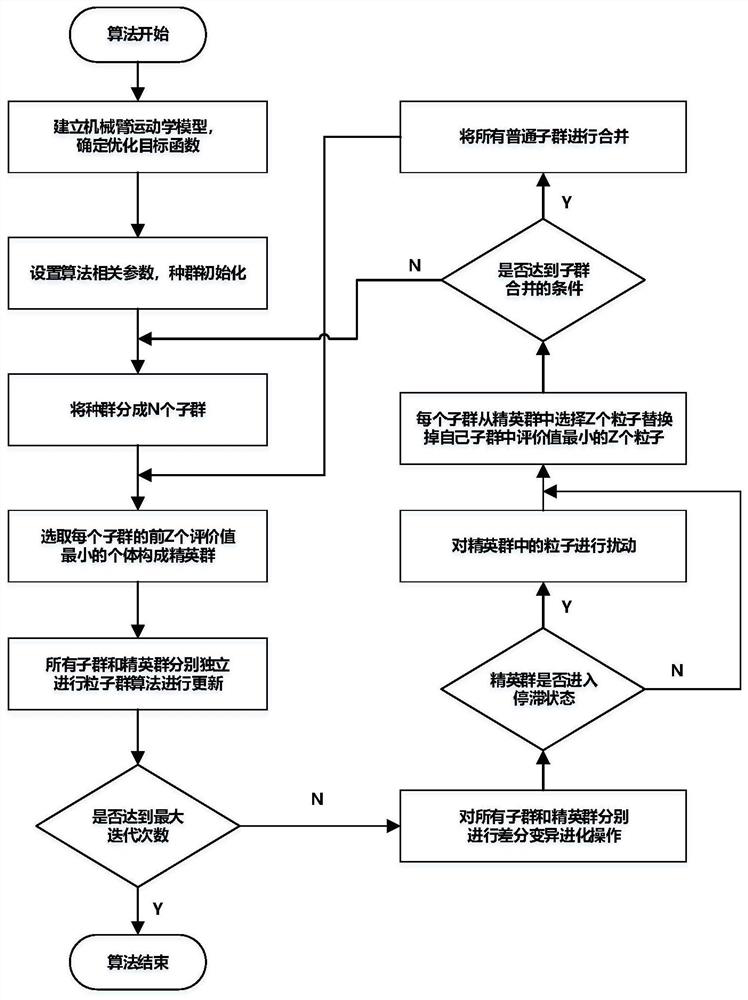
[0065] Below in conjunction with accompanying drawing, the present invention is described in further detail, and specific implementation is as follows:
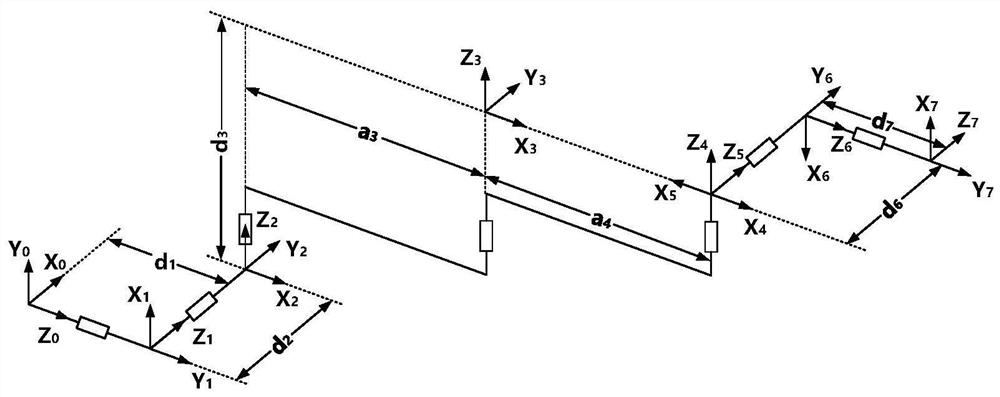
[0066] Step 1: According to figure 2 And the D-H parameters in Table 1 establish the forward kinematics model of the SSRMS manipulator.
[0067]
[0068] [n r ,o r ,a r ,p r ] = f r (θ r ) (2)
[0069] Table 1 D-H parameters of the actual SSRMS manipulator
[0070]
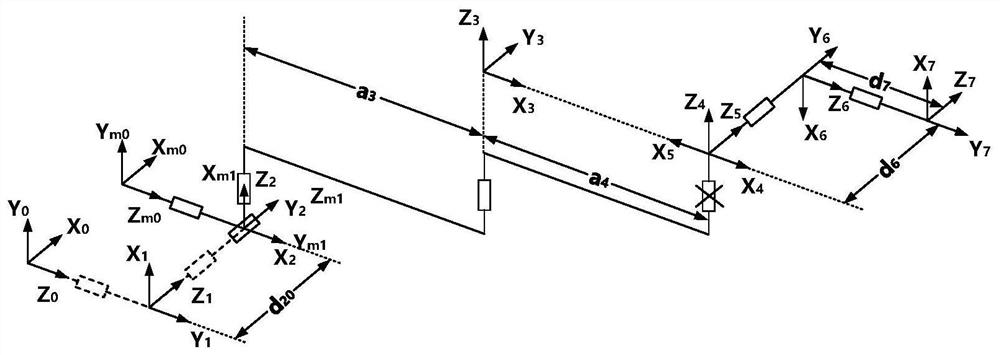
[0071] The configuration of the SSRMS manipulator after removing an offset is defined as the improved manipulator, such as image 3 As shown, it can be seen that the axes of the first three joints of the improved manipulator intersect at one point, satisfying the Pieper criterion, so there is an analytical solution to the inverse kinematics of the improved manipulator, and the forward kinematics model and inverse kinematics model of the improved manipulator are established:
[0072]
[0073] [n m ,o m ,a m ,p m ] = f m (θ m ) (4)
[0074...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More