

Industrial robot capable of automatically disassembling interference fit part
An industrial robot, interference fit technology, applied in the directions of manipulators, manufacturing tools, chucks, etc., can solve the problems of high labor intensity, damage, disassembly efficiency and poor effect, and achieve improved effect, increased amplitude, simple and reasonable structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
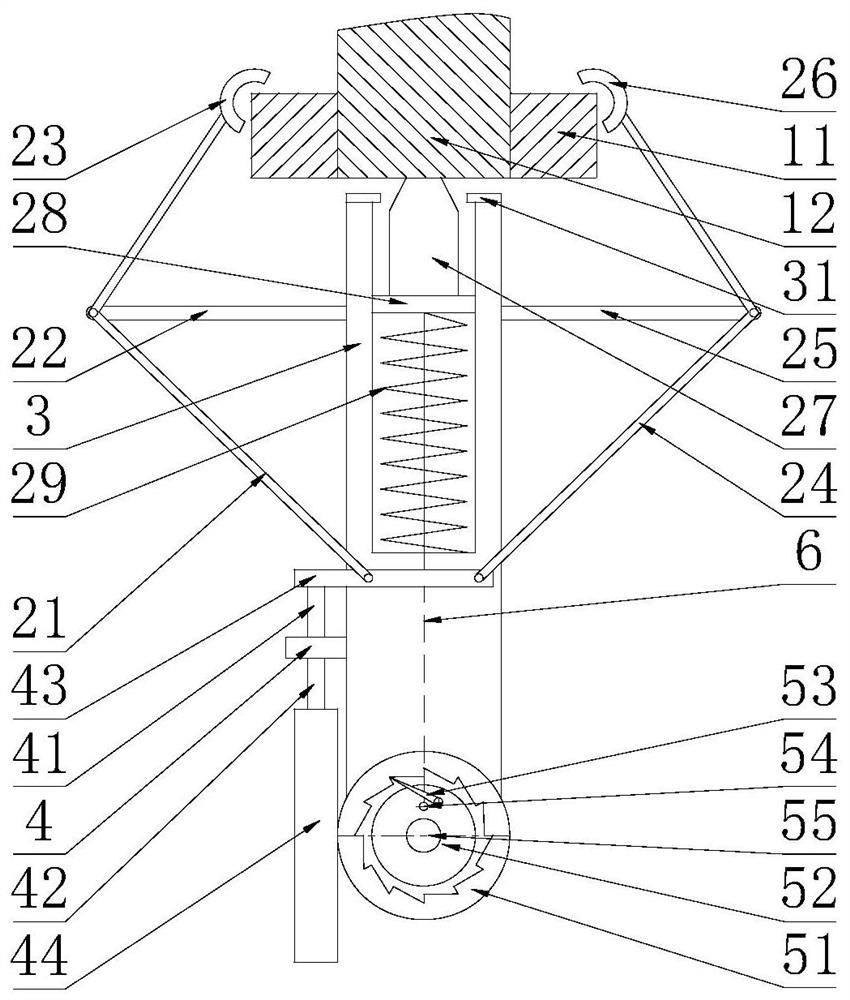
[0016] see figure 1 , an industrial robot that automatically disassembles interference fit parts of the present invention, it includes a U-shaped sleeve frame 3, a part locking device and a part locking device installed on the U-shaped sleeve frame 3 for locking and assembling the outer parts 11 The part impact device used for disassembling and assembling inner parts 12, and the double-rod piston cylinder 4 fixedly installed on the U-shaped sleeve frame 3.
[0017] Parts locking device comprises horizontal connecting rod A22 and horizontal connecting rod B25 which are symmetrically installed on the left and right sides of U-shaped sleeve frame 3, and the V-shaped connecting rod A21 which is hingedly installed at the left end of horizontal connecting rod A22 at the apex, and is hingedly installed at the apex. The V-shaped connecting r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More