Coal mine detection rescue robot with glider and working method
A rescue robot and glider technology, which is applied to motor vehicles, aircraft, unmanned aircraft, etc., can solve the problems of limited passing capacity and discounted robot detection range, and achieve the effect of reasonable design, convenient use, and expanded detection distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Embodiments of the present invention will be further described below in conjunction with accompanying drawings:
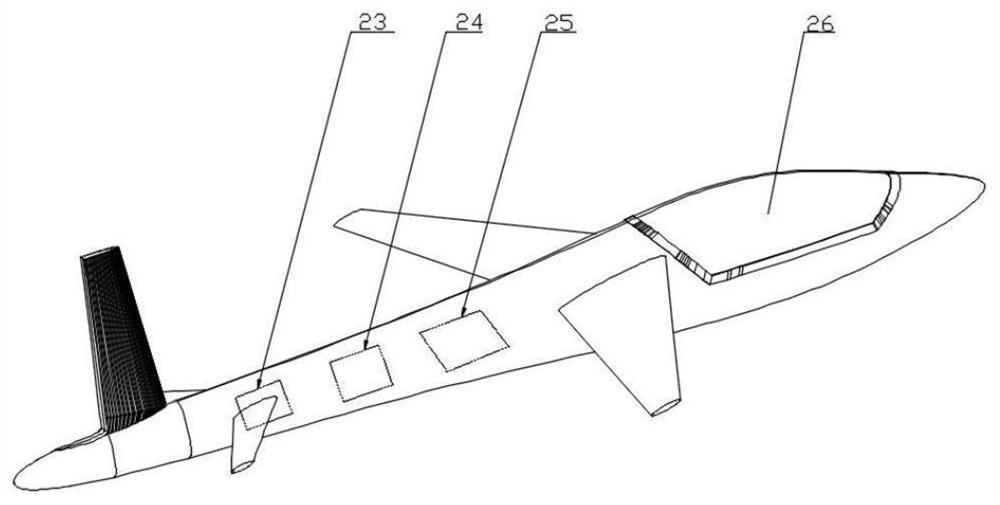
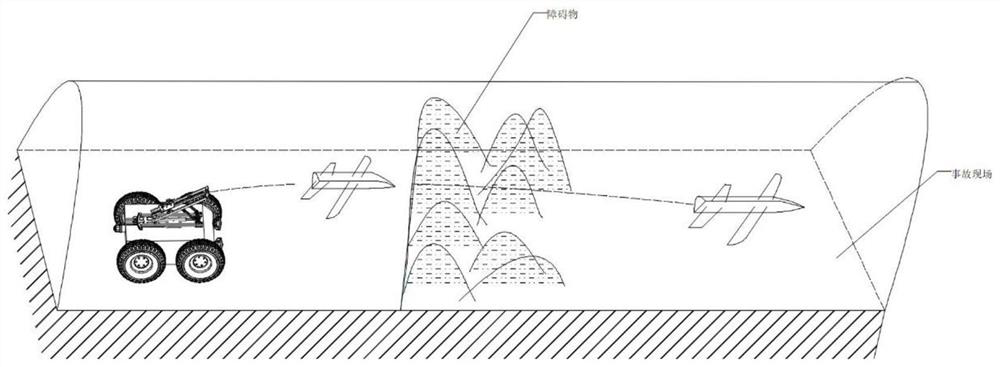
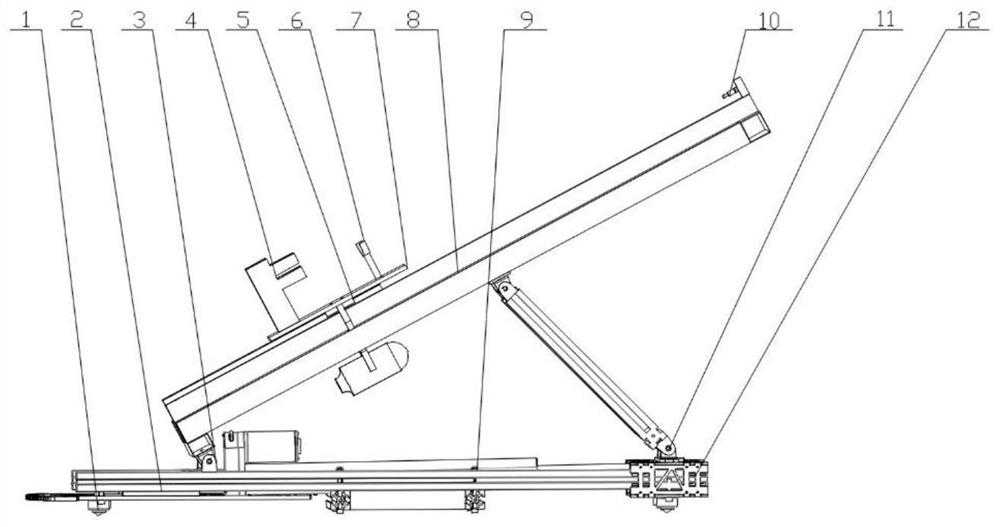
[0024] Such as Figure 6 As shown, the self-contained glider type coal mine detection and rescue robot of the present invention includes a traveling mechanism, which is provided with a launching frame, and is provided with a horizontal angle control system and an elevation angle control system between the traveling mechanism and the launching frame. The launch track and the pneumatic thrust device that provides the launch power are equipped with a glider on the launch track. The glider is equipped with a video acquisition device and a wireless transmission device. The walking mechanism is equipped with a video acquisition system, obstacle passing control system, ultrasonic ranging system and wireless Transceiver system, the walking mechanism uses the video acquisition system and the ultrasonic ranging sensor to measure the shape and distance of the obstacle,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com