Underground pipe gallery power transmission line fault detection robot
A technology for underground pipe gallery and fault detection, applied in the direction of collectors, circuit devices, battery circuit devices, etc., can solve the problems of unsafe personnel, data differences, and insufficient objectivity, and achieve the effect of convenient use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in further detail below in conjunction with specific examples, but the embodiments of the present invention are not limited thereto.
[0055] In order to solve the technical problem that the existing walking inspection robot is not suitable for the tortuous and complicated utility corridor environment, the embodiment of the present invention provides a fault detection robot for the transmission line of the underground utility corridor.
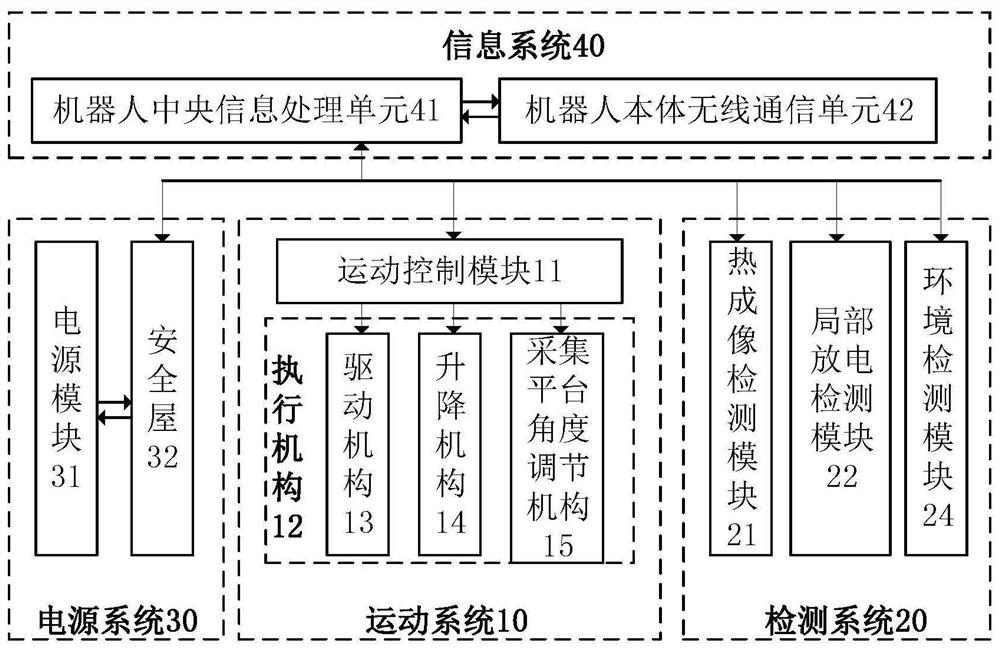
[0056] See figure 1 , figure 1 It is a structural block diagram of a transmission line fault detection robot for an underground utility gallery provided by an embodiment of the present invention. The fault detection robot includes a motion system 10 , a detection system 20 , a power supply system 30 and an information system 40 , and each part will be described in detail below.
[0057] (1) Motion system 10
[0058] The motion system 10 of the embodiment of the present invention includes a moti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com