

Target vehicle position and orientation detection method and system and storage medium
A target vehicle and vehicle technology, applied in neural learning methods, measuring devices, surveying and navigation, etc., can solve the problems of distance value error, large position and distance error, difficult to measure motion posture, etc., to improve detection accuracy and increase prediction , Movement attitude detection and accurate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
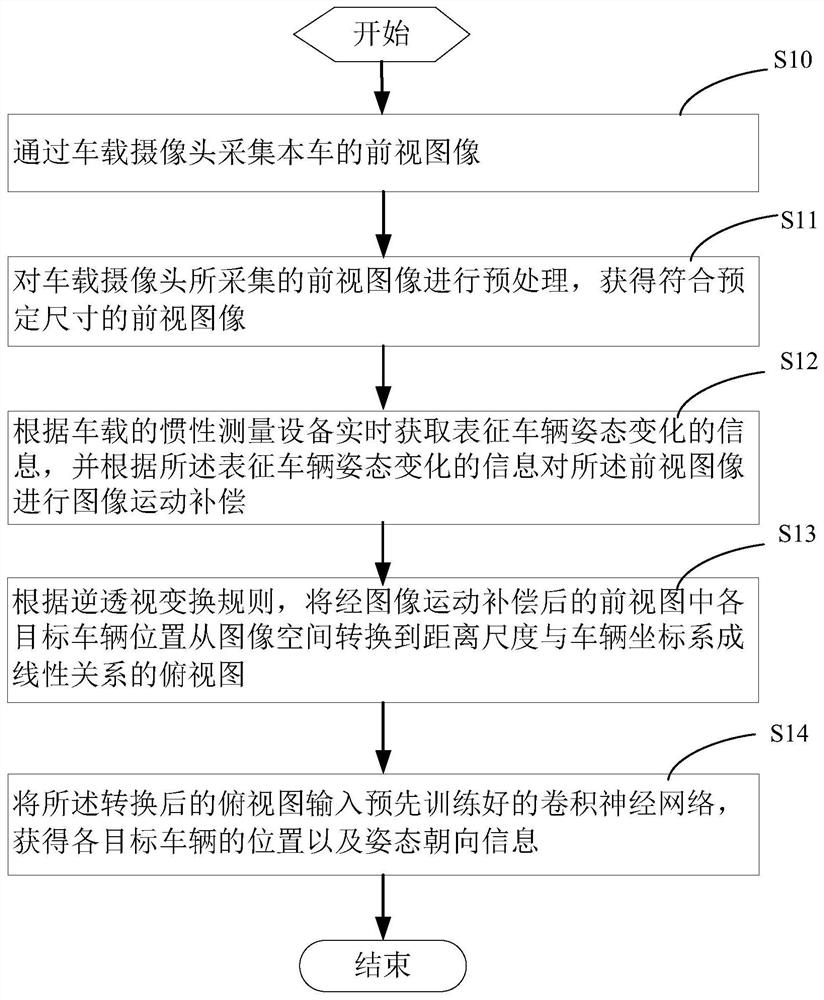
[0074] Such as figure 1 As shown, it shows a schematic diagram of the main flow of an embodiment of a method for detecting the position and orientation of a target vehicle provided by the present invention; together with Figure 2 to Figure 5 As shown, in this embodiment, a method for detecting the position and orientation of a target vehicle provided by the present invention includes the following steps:
[0075] Step S10, collecting the front-view image of the vehicle through the vehicle-mounted camera, and the front-view image includes at least one image of other vehicles except the vehicle;
[0076] Step S11, performing preprocessing on the front-view image collected by the vehicle camera to obtain a front-view image conforming to a predetermined size, wherei...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More