

Control method and device of limb movement assisting support
A motion support and control method technology, applied in non-electric variable control, two-dimensional position/channel control, control/adjustment system, etc., can solve the problem of lack of perception ability and difficult to accurately control motion support motion, motion auxiliary device Problems such as weak perception and planning ability to achieve the effect of improving real-time processing rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
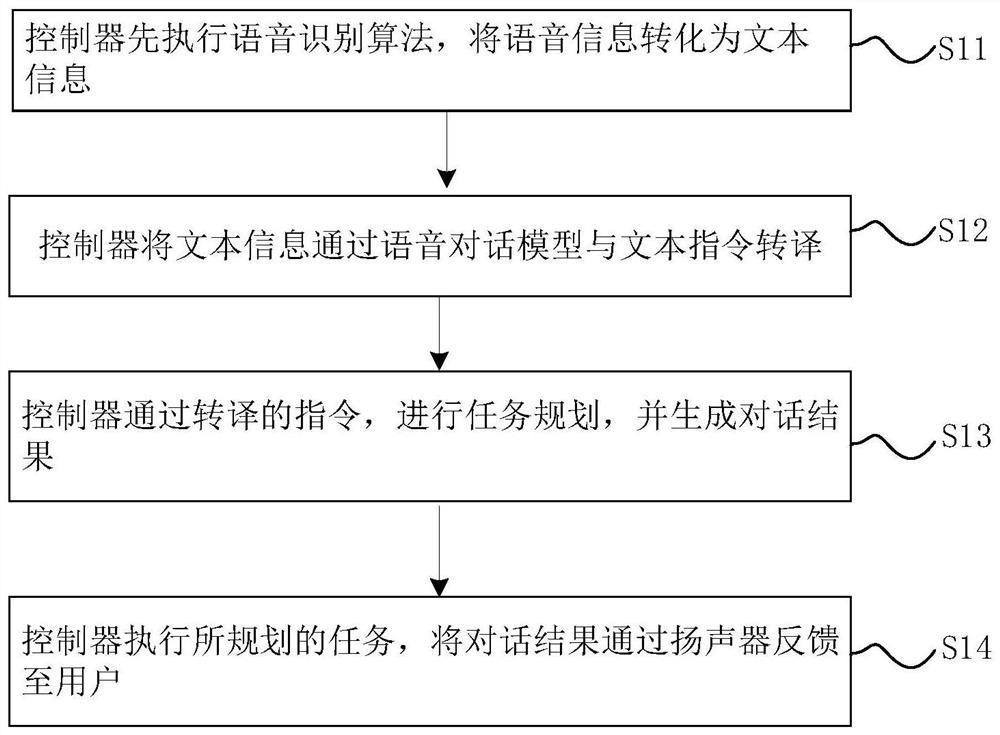
[0038] figure 1 A flow chart of the control method of the auxiliary limb movement support 1 provided by the present invention,
[0039] This embodiment 2 proposes a control method for the auxiliary body movement support 1, the controller 3 receives the voice information extracted by the sensor 2, and the steps of generating path planning and dialogue results include:
[0040] S11: the controller 3 first executes a voice recognition algorithm to convert the voice information into text information;
[0041] S12: the controller 3 translates the text information through the speech dialogue model and text instructions;
[0042] S13: the controller 3 performs path planning through the translated instructions, and generates a dialogue result;
[0043] S14: The controller 3 executes path planning, and feeds back the dialog result to the user through the speaker 21 .
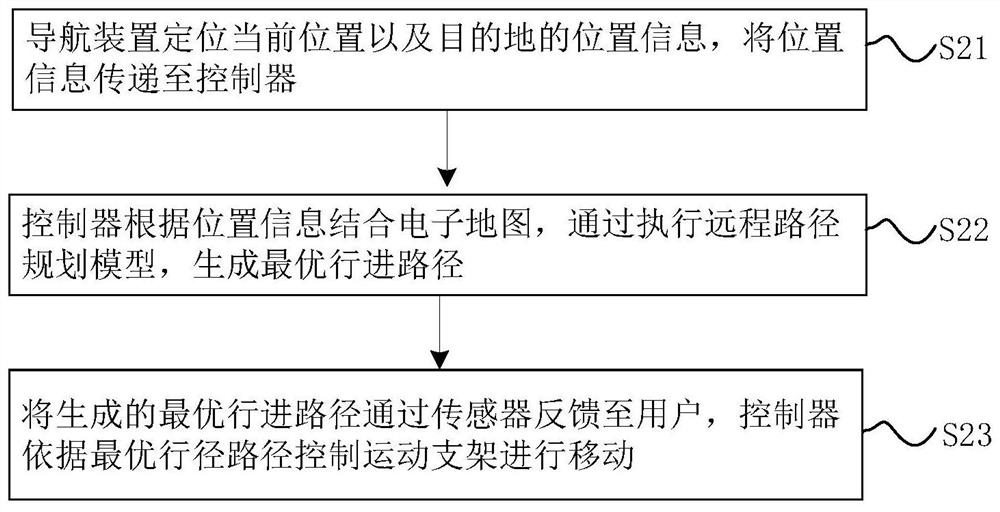
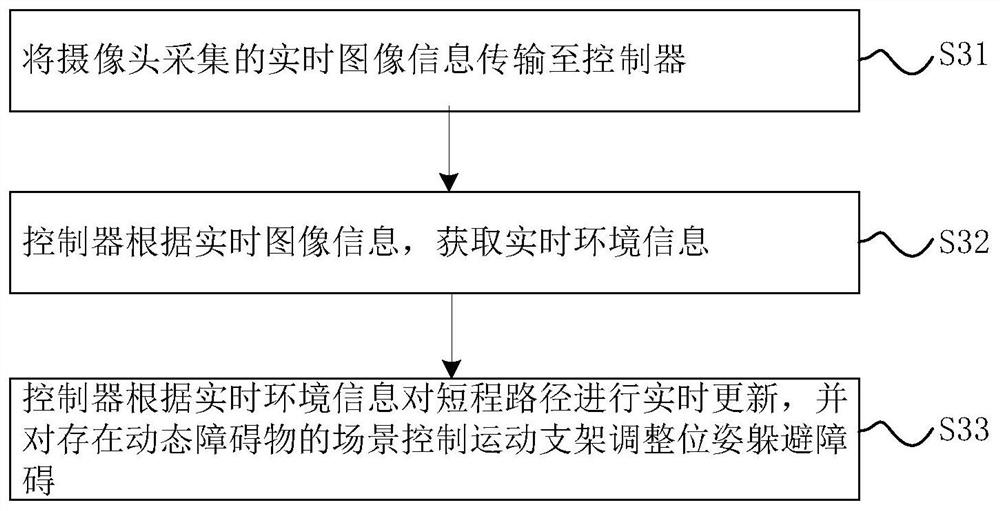
[0044] Path planning includes long-distance path planning and short-distance path planning. The long-distance path...
Embodiment 2
[0058] On the basis of Embodiment 1, this embodiment 2 proposes a device for assisting limb movement support, which is used to execute the control method. The device includes: a movement support 1, used to assist the user's walking; Realize path planning, control the obstacle avoidance, braking, correction and traction of the moving support 1; the sensor 2 is used to extract the real-time information of the surrounding environment; the navigation device 4 is used to extract the current position information and the destination position information, combined with electronic The map generates the best path to travel.
[0059] The motion support 1 includes a motion control component 10, a motion control interface 11 and a wearable component 12. The motion control component 10 is used to control the posture, walking and braking of the motion support 1; the motion control interface 11 is used to connect with the control terminal to receive the support Control instructions; the weara...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More