Laser visual tracking correction method for welding of non-body external shaft of robot
A robot body and visual tracking technology, which is applied to welding equipment, welding accessories, arc welding equipment, etc., can solve the problems of many trial teaching points, the inability to obtain non-body external axis data, and the inability to use the robot's own welding seam tracking function, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
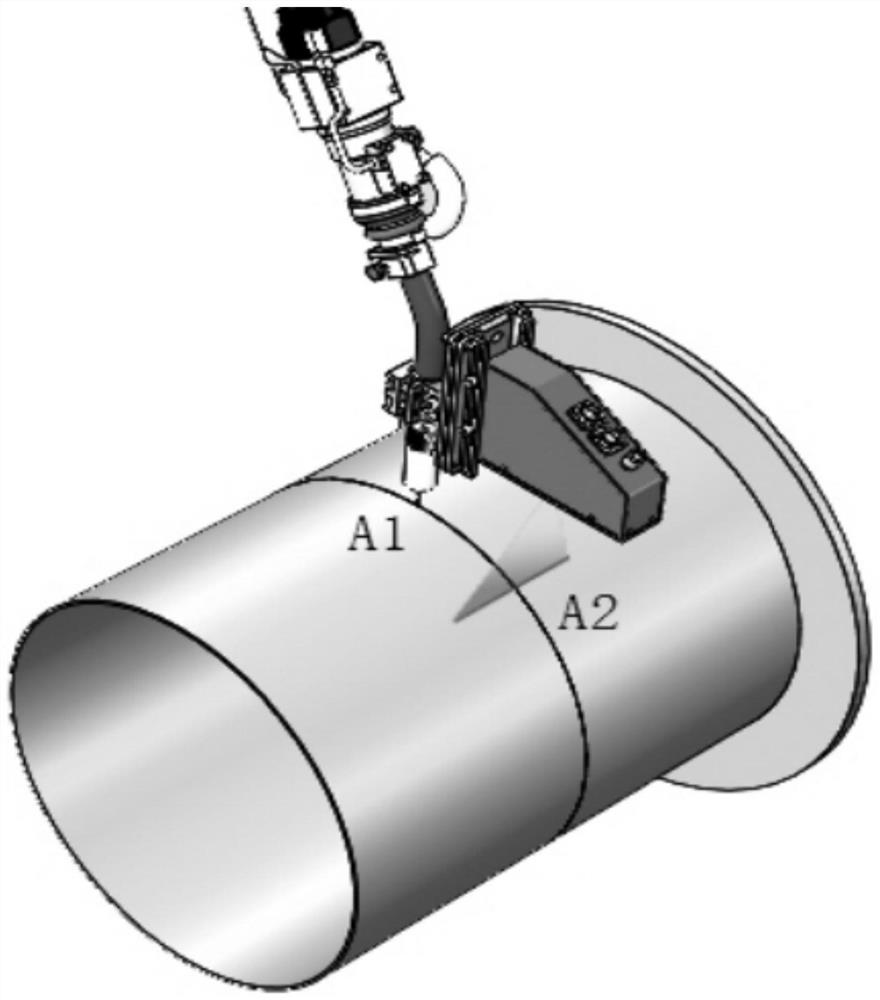
[0027] see figure 1 , the embodiment of the present invention provides a technical solution: a laser vision tracking correction method for robot non-body external axis welding, which specifically includes the following steps:
[0028] S1. Before starting welding, turn on the power, the system starts to work, and the program starts to run. Adjust the position of the welding torch at the end of the robot through the positioning function of the sensor, so that th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More