Multi-mobile-robot formation adaptive fault-tolerant control method with preset performance
A mobile robot, fault-tolerant control technology, applied in the direction of non-electric variable control, two-dimensional position/channel control, control/adjustment system, etc., can solve the problem of unstable formation control of mobile robots, achieve reliable and stable formation control, eliminate adverse effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
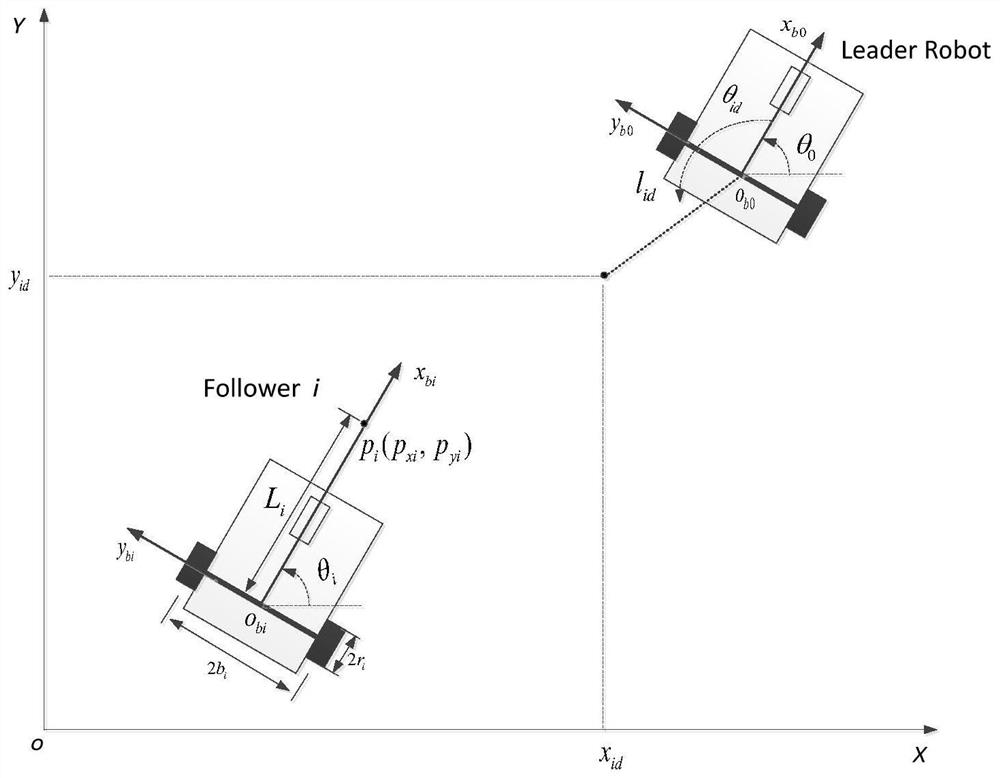
[0180] This embodiment provides the comparison results of two different control methods: multi-mobile robot formation adaptive fault-tolerant control method (C1) with preset performance, u vi , u ωi The design is as formula (17) and formula (18), and the control torque design is as formula (25); the multi-mobile robot formation adaptive fault-tolerant control method without preset performance (C2), u vi , u ωi designed as u vi =-k 7i e xi -Γ 1i , u ωi =-k 8i e yi -Γ 2i , k 7i >0,k 8i >0, the adaptive fault-tolerant torque control law is designed as formula (25). There are three mobile robots in this embodiment: Leader Robot, Follower 1, and Follower 2.
[0181] Linear speed v of Leader Robot 0 set to v 0 =0.5m / s, angular velocity ω 0 set to ω 0 =0.1rad / s, the initial pose coordinates are set to q 0 =[0,0,0] T . The physical parameters of Follower 1 are set to m 1 =10.5kg, I 1 =3.11kg·m 2 , r 1 = 0.25m, b 1 =0.4m,L 1 =1.6m; the initial pose coordinates ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More