

Unknown space autonomous exploration system based on quadruped robot
A quadruped robot and robot positioning technology, applied in the field of autonomous exploration system in unknown space, can solve the problems of long and narrow, no communication signal, darkness, etc., and achieve the effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
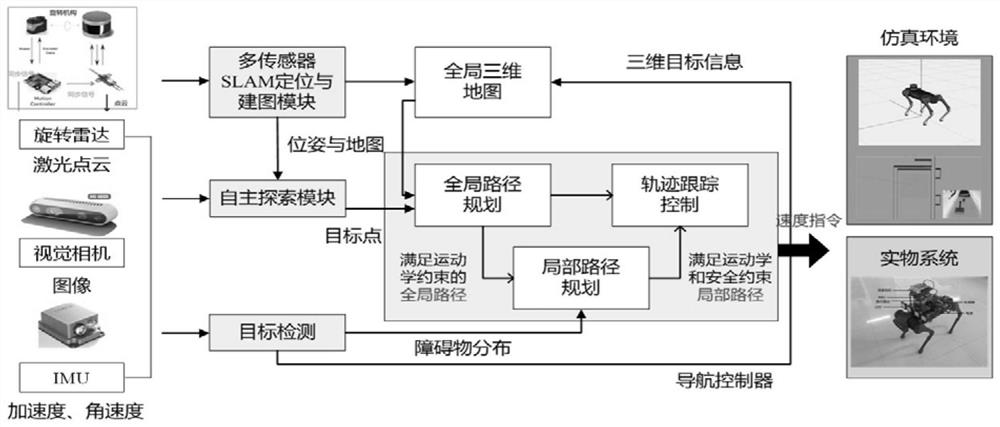
[0035] like figure 1 As shown, in the present embodiment, the unknown space autonomous exploration system based on quadruped robot is as follows:
[0036] The system includes a data acquisition module, a positioning and mapping module, an autonomous exploration module and a target detection module;
[0037] The data collection module sends the collected information to the positioning and mapping module, the autonomous exploration module and the target detection module for data analysis;
[0038] The data acquisition module includes a laser radar, a camera and an IMU sensor, which respectively collect laser point cloud data information, image information of the environmen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More