

High-torque integrated driving joint suitable for deep-sea robot
A robot and high-torque technology, applied in manipulators, program-controlled manipulators, ships, etc., can solve the problem of small output torque of deep-sea motors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
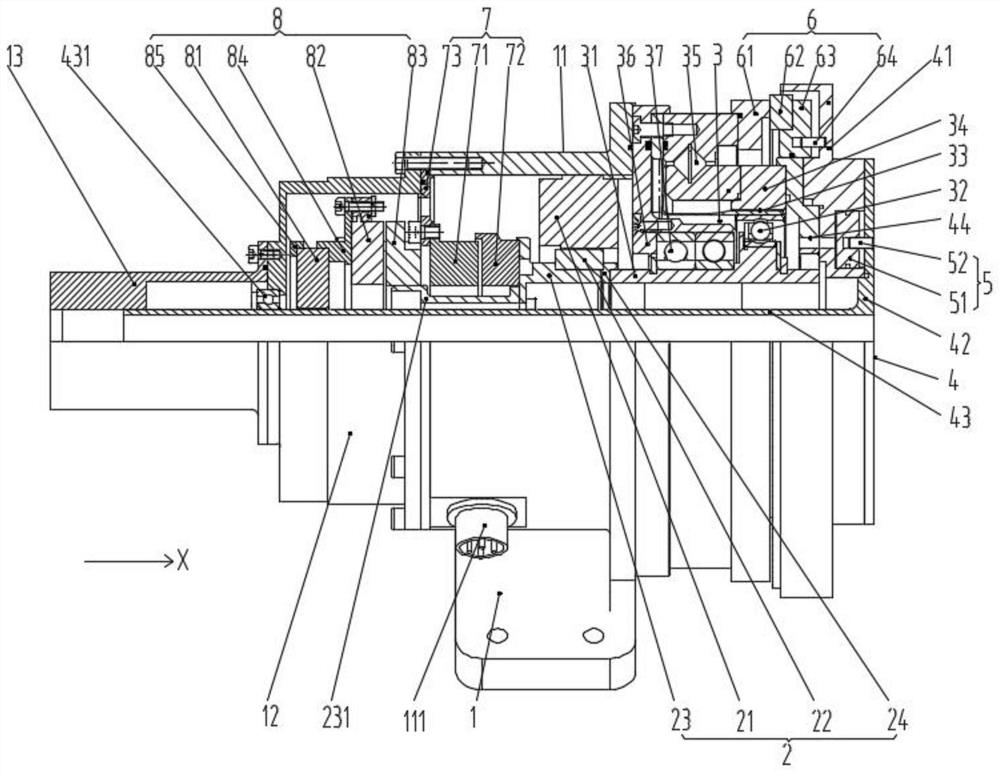
[0026] In order to make the above objects, features and advantages of the present invention more comprehensible, specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0027] In the description of the present invention, it should be understood that the orientations or positional relationships indicated by the terms "front", "rear", etc. are based on the orientations or positional relationships shown in the drawings, and are only for the convenience of describing the present invention and simplifying the description. It is not intended to indicate or imply that the referred device or element must have a particular orientation, be constructed in a particular orientation, and operate in a particular orientation, and thus should not be construed as limiting the invention.
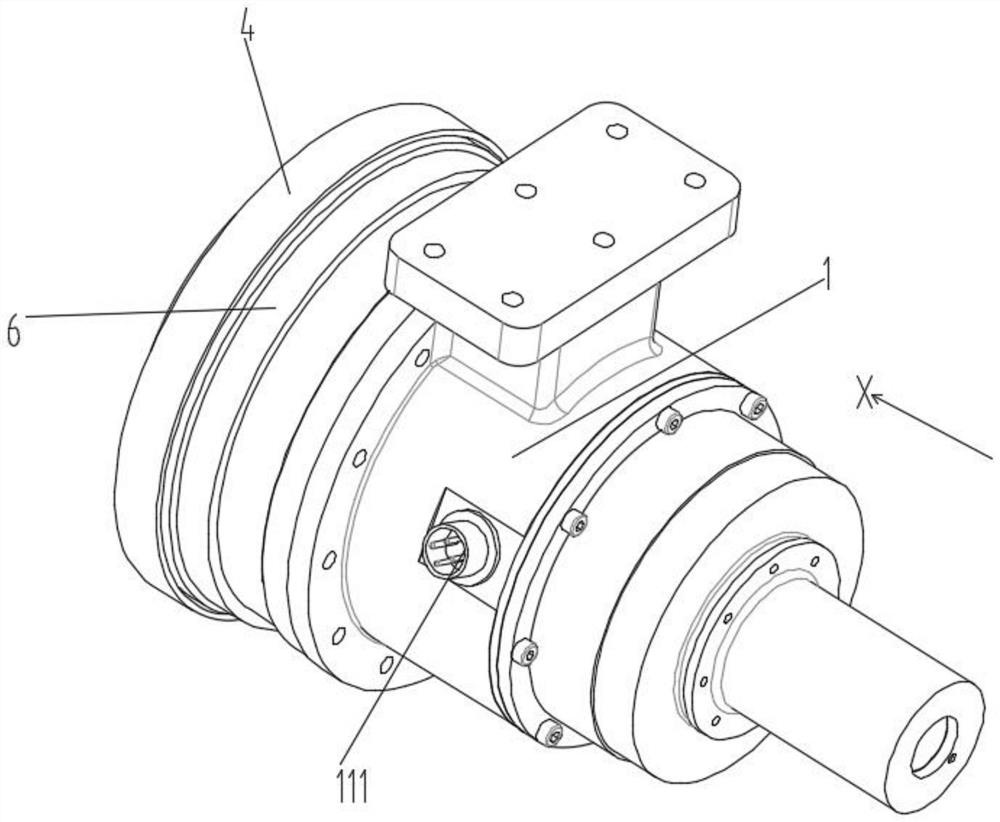
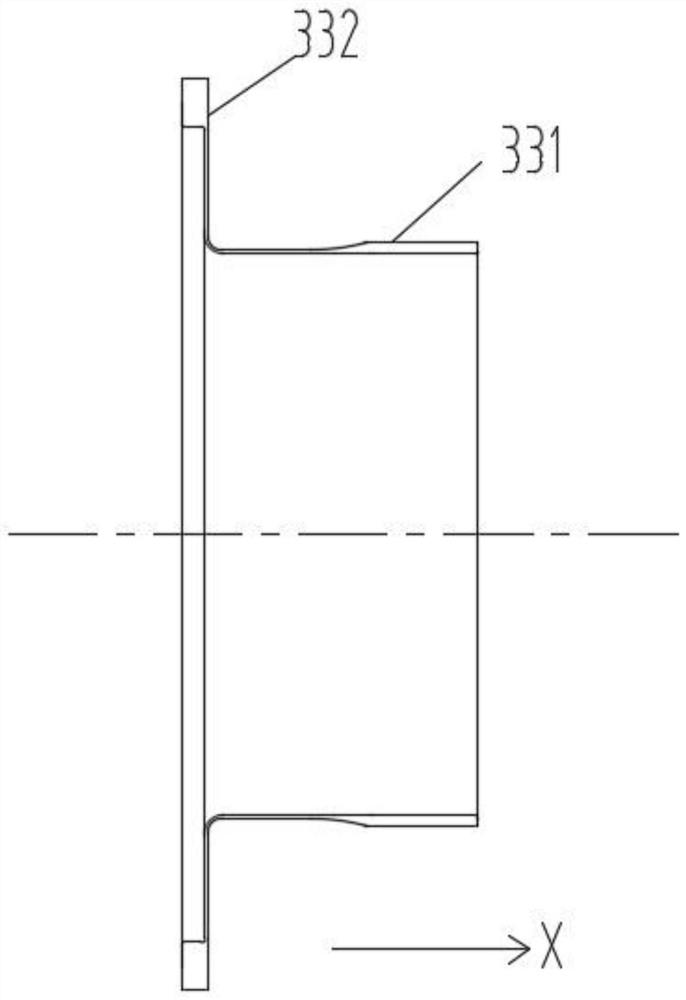
[0028] Moreover, in the accompanying drawings, the X-axis represents the longitudinal direction, that is, the front-to-back position, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More