

Underactuated lower limb assistance exoskeleton robot based on rope-pulley mechanism
An exoskeleton robot and under-actuated technology, which is applied in passive exercise equipment, equipment to help people walk, manipulators, etc., can solve the problems of large mass of exoskeleton itself, large driving energy consumption, and inability of passive joint exoskeleton to provide, etc. Achieve the effects of not easy impact damage, low cost and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
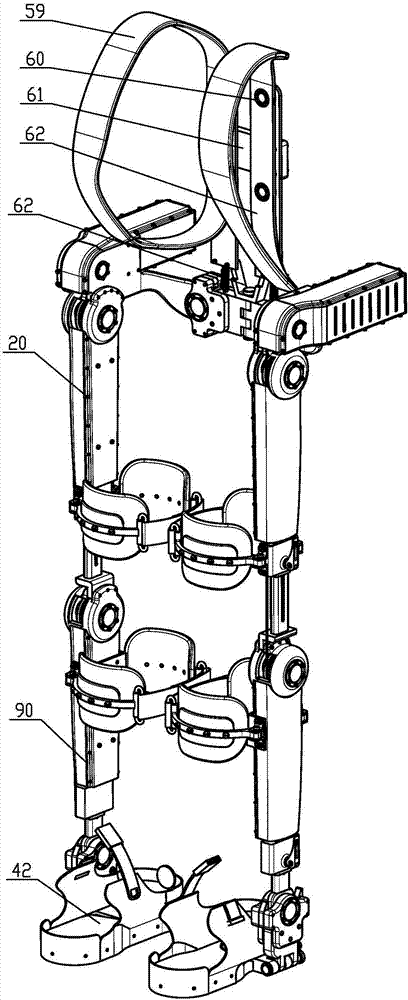
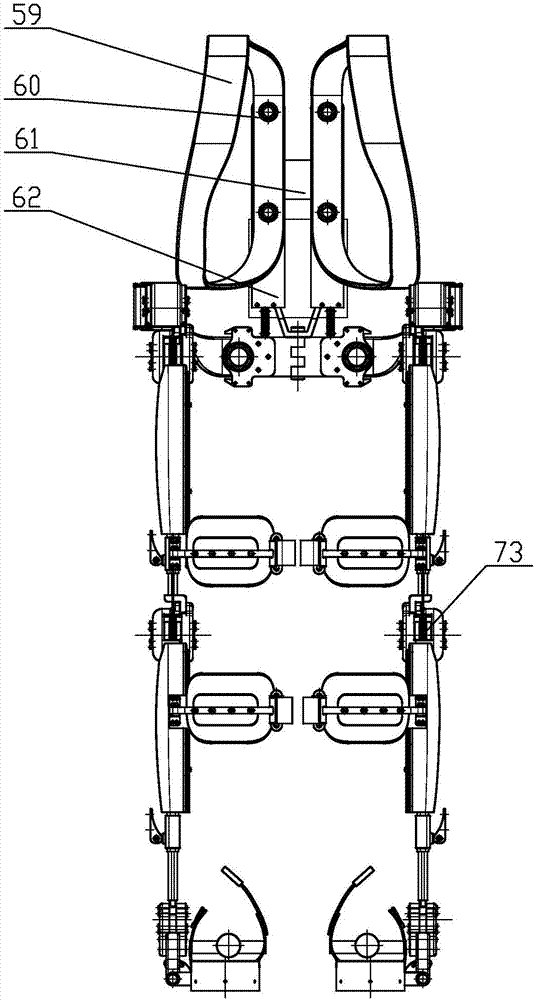
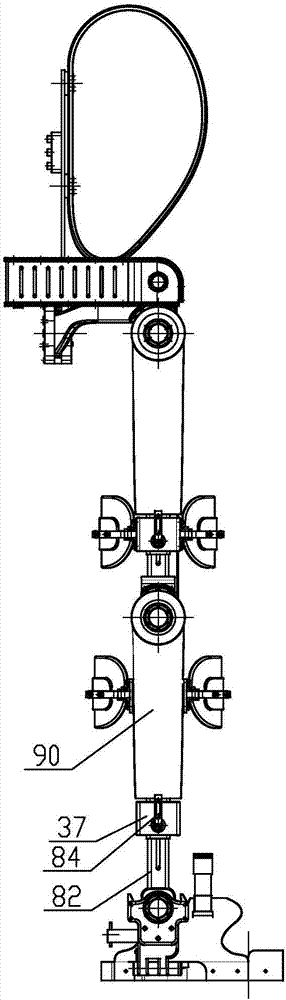
[0014] Specific implementation mode one: combine Figure 1-Figure 19 Describe this embodiment, the underactuated lower limb power-assisted exoskeleton robot based on the rope-pulley mechanism described in this embodiment includes a strap device, a drive control power supply system 74, two thigh rod devices, two calf rod devices, and two ankle rod devices. Joint device, two driving devices and two wire ropes 73; each driving device includes a motor housing support 1, a first motor housing 3, a waist frame 4, a planetary reducer 5, a second motor housing 6, and a servo motor 7 , the third motor housing 8, the hip joint spline shaft 9, the driving pulley 10, the elastic driver 11, the first shaft sleeve 12, the small bevel gear 13, the large bevel gear 14, the second shaft sleeve 15, the fourth motor housing 16, The fifth motor casing 17, the fixed plate and two first bearing end caps 2 with bearings; the motor housing bracket 1 includes a bracket bent plate 1-1, a first straight...
specific Embodiment approach 2
[0016] Specific implementation mode two: combination Figure 1-Figure 3 and Figure 5Describe this embodiment, the underactuated lower limb power-assisted exoskeleton robot based on the rope-pulley mechanism described in this embodiment, the strap device includes a connecting block 61, a waist connecting buckle 63, a first rotating joint connecting buckle 65, an intermediate shaft 69, a second Rotary joint connection buckle 70, two straps 59, two strap plates 62, two connecting springs 64, two swivel bases 66, two first limit blocks 67, two second limit blocks 68, two Hip joint rotation shaft 71, two waist end caps 72 with bearings and a plurality of fixed covers 60 with connecting nails; waist connecting buckles 63 are 'V' shaped blocks, and two strap plates 62 are vertically arranged, each A strap 59 is installed on each strap board 62 through two fixed covers 60 with connecting nails, and the two strap boards 62 are fixedly connected through the connecting block 61. The dr...
specific Embodiment approach 3
[0017] Specific implementation mode three: combination Figure 7-Figure 10 Describe this embodiment, the underactuated lower limb power-assisted exoskeleton robot based on the rope-pulley mechanism described in this embodiment, the thigh rod device includes a hip joint shell 18, a second bearing end cover 19 with bearings, a first thigh shell 20, Thigh binding bushing 21, thigh aluminum plate bushing 22, thigh binding metal ring 23, first thigh rod 24, second thigh rod 25, thigh locking block 26, thigh locking button 27, thigh locking handle 28, calf fixation Frame 30, hip joint pulley 31, hip joint shaft 32, hip joint outer seat 34, thigh binding belt 36, two first torsion springs 33, two thigh binding belt rings 35 and a plurality of thigh fixing supports 29, the second thigh The top of the rod 25 is processed with a hip joint pulley installation groove, and the two side walls of the hip joint pulley installation groove are processed with hip joint shaft installation holes. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More