Water area heterogeneous multi-unmanned-vehicle consistent formation method
A consistent, unmanned vehicle technology, applied in the direction of instrumentation, non-electric variable control, altitude or depth control, etc., can solve problems with limited range and no formation involved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
[0027] Step 1: Define the following limit form. If the state of the heterogeneous multi-agent system reaches the following limit under the given undirected communication topology, the system is said to have reached consistency:
[0028] A system is said to be dynamically consistent if it satisfies the following conditions.
[0029]
[0030]
[0031]
[0032]
[0033] A system is said to be quiescently consistent if the system state satisfies the following conditions.
[0034]
[0035]
[0036]
[0037]
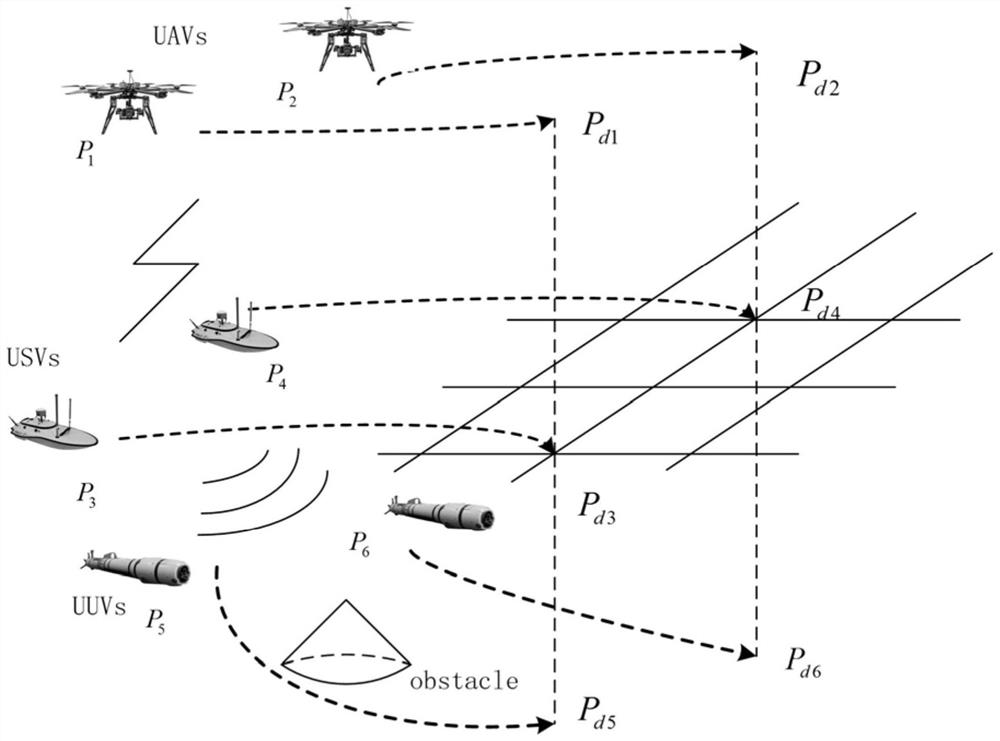
[0038] where P d =P di -P dj i,j=1,2,...,n.
[0039] P d Represents the set of expected distances between any two agents. When the time tends to infinity, if the agent reaches the specified position in the formation, it means that the distance between any two agents remains the same, that is, P d , indicating t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com