

Multi-joint accurate positioning carthamus tinctorius harvesting mechanical arm and harvesting method
A precise positioning and multi-joint technology, applied in the direction of picking machines, harvesters, agricultural machinery and implements, etc., can solve the problems of inaccurate identification and positioning, pollution of safflower, dense and disorderly, etc., to improve harvesting efficiency and accurately align Flowers, the effect of improving the success rate of harvesting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0129] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
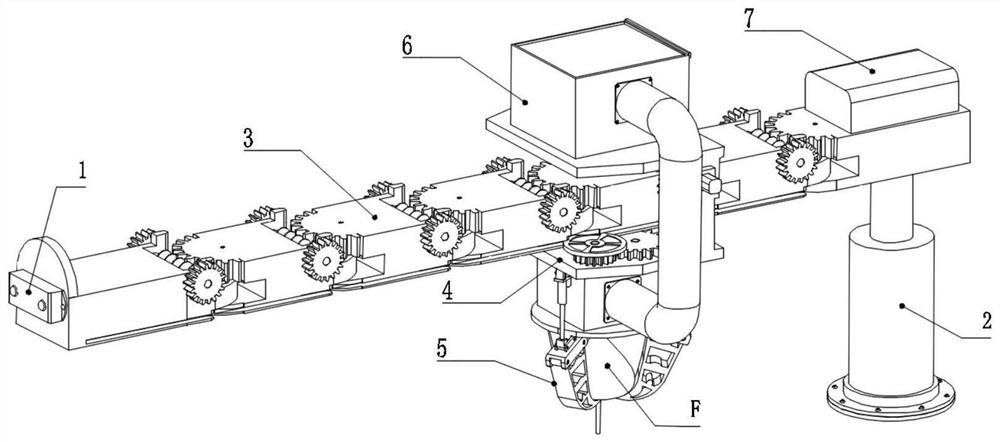
[0130] Such as figure 1 As shown, a multi-joint precise positioning safflower harvesting robot arm includes a binocular visual recognition system 1, a vertical lifting mechanism 2, a multi-joint connection module 3, a motor drive device 4, a filament harvesting mechanism 5, and a negative pressure collection mechanism 6 and controller 7.
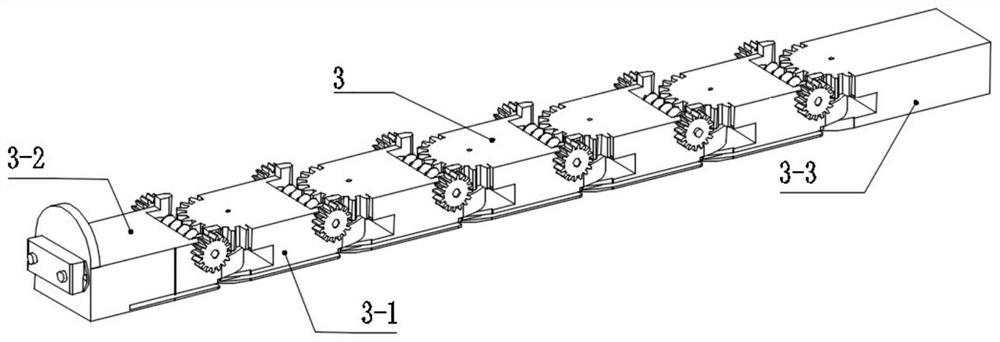
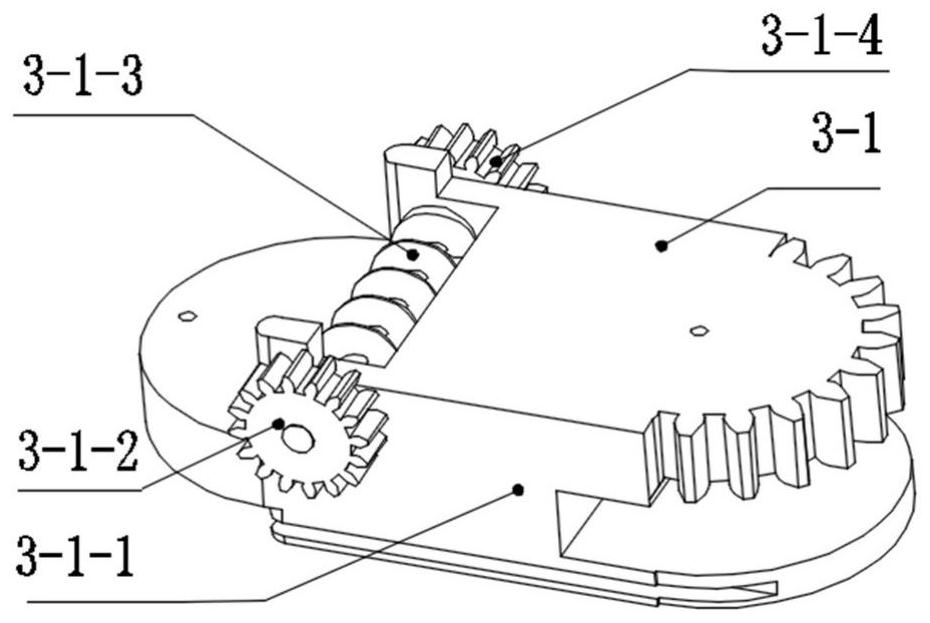
[0131] Such as figure 2As shown, the multi-joint connecting module 3 includes an intermediate connecting block 3-1, a front connecting block 3-2 and a rear connecting block 3-3; the front connecting block 3-2, a plurality of intermediate connecting blocks 3-1, the rear The end connection blocks 3-3 are connected head to tail in sequence; the rear end connection block 3-3 is affixed to the top of the vertical lifting mechanism 2, and the bottom end of the vertical elevating mechanism 2 is affixed to the harvester; t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More