

Linkage control method and system for mechanical arm and bed
A technology of linkage control and robotic arm, applied in the linkage control method of robotic arm and bed, control system, and intelligent human meridian conditioning equipment, which can solve the problem of short stroke range, increased cost, and inability to complete the position of the patient's head and feet Conditioning and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
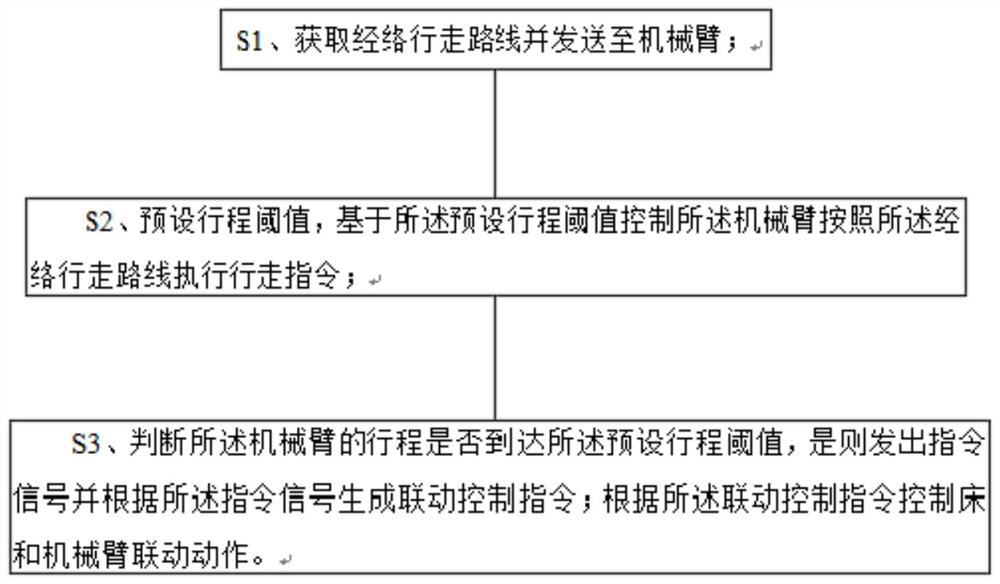
[0064] Such as figure 1 As shown, according to another aspect of the present disclosure, a linkage control method of a mechanical arm and a bed is provided, including the following steps:
[0065] S1. Get the meridian walking route and send it to the robotic arm;
[0066]The meridian walking route is identified by point cloud acquisition equipment, cameras or AI vision systems. For example, AI vision systems can be used to scan and identify patients lying in bed to obtain data. After data processing by the system, point cloud data can be established. Based on these The data establishes a virtual meridian model, and the meridian model has key points of meridians, and the connection between these key points of meridians can be used as the movement point of the robotic arm, so that the robotic arm can move according to the meridian points under the control of the system, so as to realize Massage and regulate the meridians of the patient's body;
[0067] This application realize...
Embodiment 2
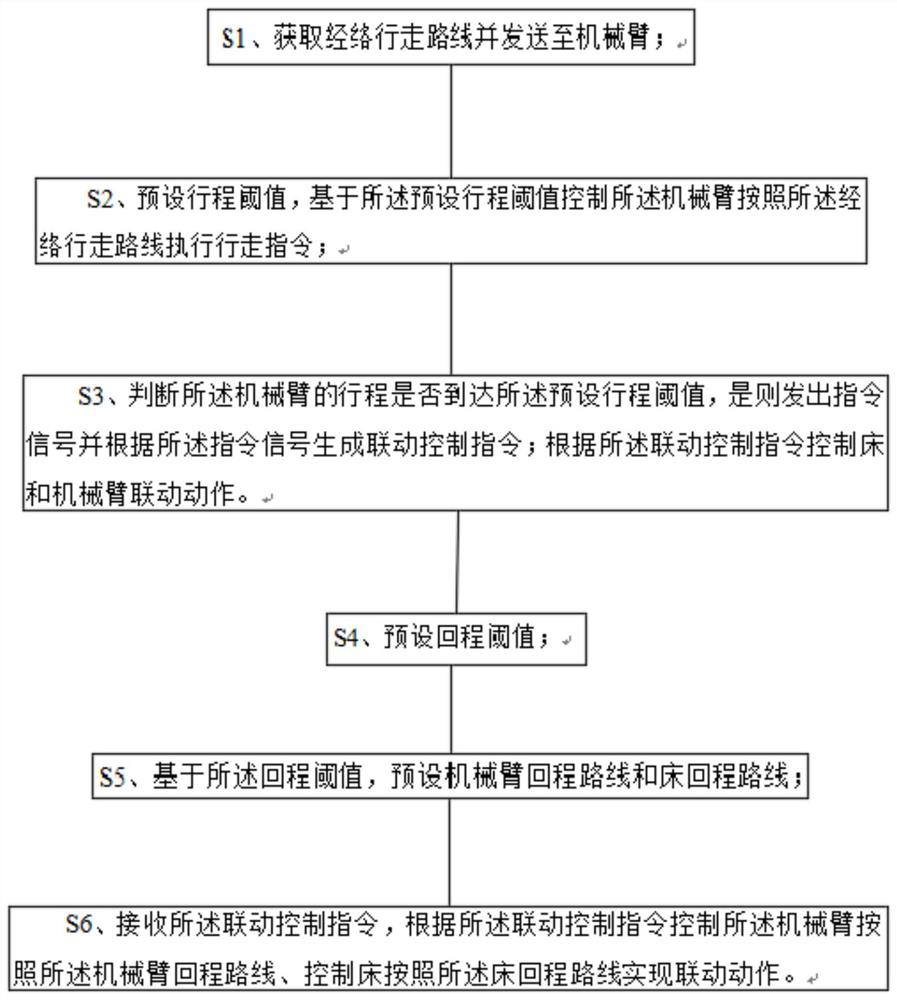
[0108] On the basis of Embodiment 1, in order to prevent the mechanical arm from reaching the preset stroke threshold and returning to the bed for a certain distance, exceeding the working range and the body length of the human body, etc., this embodiment sets the return threshold to ensure The linkage between the mechanical arm and the bed is at an appropriate distance, which can be set by the user.
[0109] as attached figure 2 As shown, in one possible implementation,
[0110] Also includes:
[0111] S4. Presetting the return threshold;
[0112] Similarly, the return threshold can be set by the user according to the length of the robotic arm;
[0113] S5. Based on the return threshold, preset the return route of the robotic arm and the return route of the bed;
[0114] When receiving the linkage control instruction signal to control the synchronous linkage action of the mechanical arm and the bed:
[0115] The bed will move back a certain distance with the robotic arm...
Embodiment 3
[0144] According to an aspect of the present disclosure, a control system is provided, comprising:
[0145] processor;
[0146] memory for storing processor-executable instructions;
[0147] Wherein, the processor is configured to realize the linkage control method of the mechanical arm and the bed when executing the executable instruction.
[0148] refer to image 3 , the control system in this embodiment of the present disclosure includes a processor and a memory for storing instructions executable by the processor. Wherein, the processor is configured to implement any one of the aforementioned linkage control methods of the mechanical arm and the bed when executing the executable instructions.
[0149] Here, it should be noted that the number of processors may be one or more. Meanwhile, in the control system of the embodiment of the present disclosure, an input device and an output device may also be included. Wherein, the processor, the memory, the input device and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More