Robot space attitude resolving method based on structured light array remote identification
A space posture and robot technology, applied in the field of structured light array, can solve the problems of increasing the cost and energy consumption of wall-climbing robots, and achieve the effect of good algorithm stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
[0041] The solution method of robot space attitude based on structured light array remote recognition, hardware design, including:
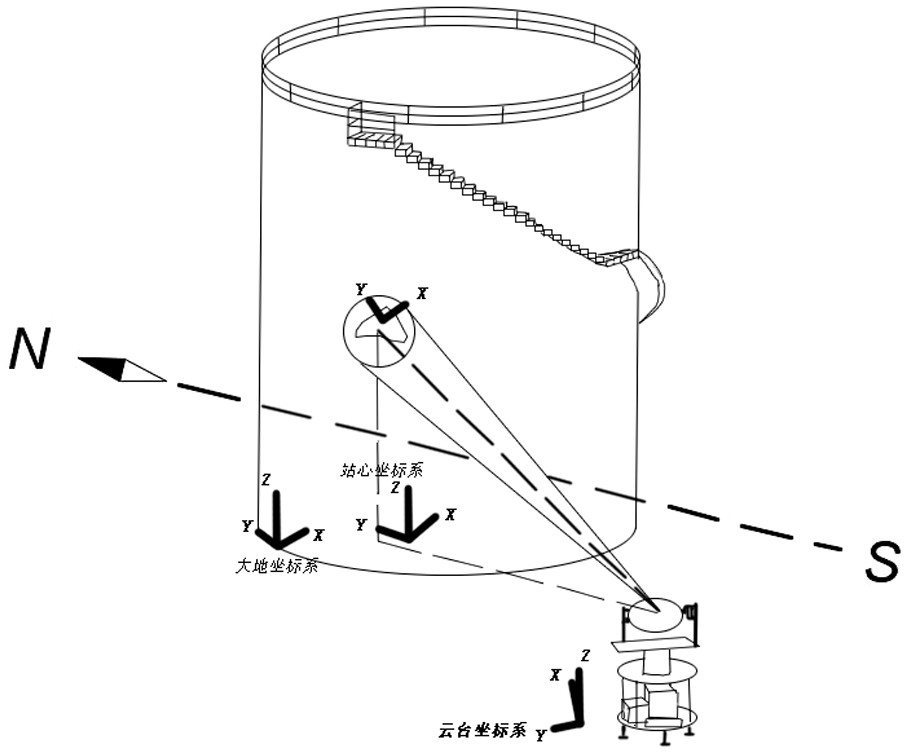
[0042]1. Scenario introduction: This method is demonstrated by taking a three-wheeled magnetic adsorption wall-climbing robot as an example. Such as figure 1 As shown, the wall-climbing robot is placed on the surface of the steel oil tank, and the pan-tilt camera is randomly placed next to the oil tank, and the robot can move on the surface of the oil tank.
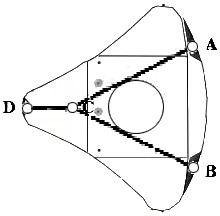
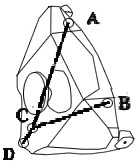
[0043] 2. Structured light array selection and geometric parameter design: Fix four LED lights on the highest plane of the robot surface and number them: A and B are red lig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More