

Finite time tracking compound control method for unmanned vehicle
A limited time, compound control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problem of low accuracy of trajectory tracking control, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
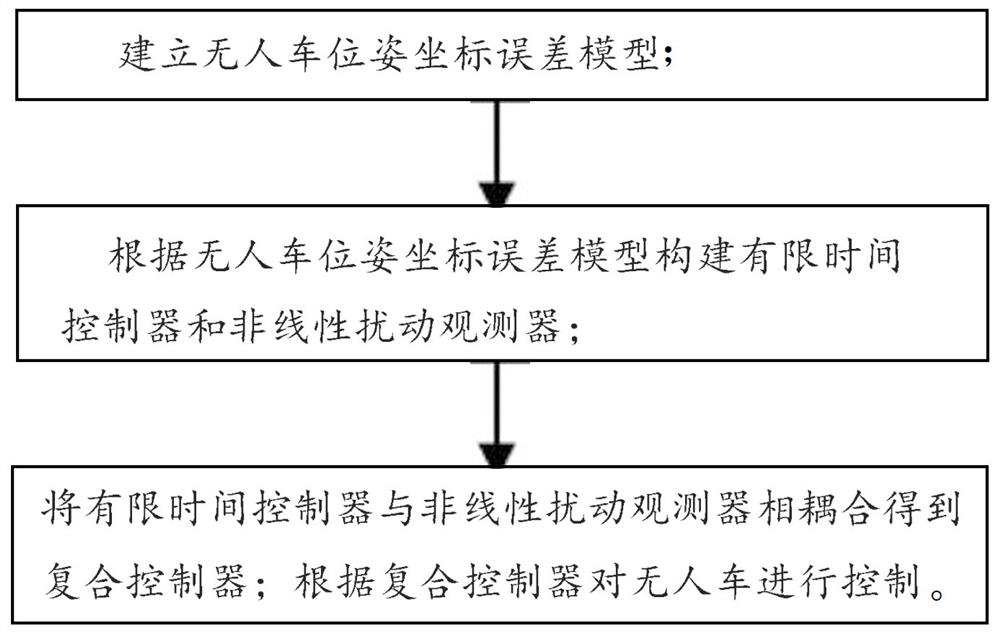
[0036] combine figure 1 As shown, a finite-time tracking compound control method for unmanned vehicles of the present invention, by designing a finite-time controller and a nonlinear disturbance observer, the real-time pose coordinate information is input into the nonlinear disturbance observer through the finite-time controller , to obtain the disturbance observation value, and then use the disturbance as a feed-forward compensation to the finite-time controller to eliminate the influence caused by the disturbance during the tracking control of the unmanned vehicle, so as to obtain the linear velocity of the unmanned vehicle that changes with time, and finally obtain the center of mass The yaw rate and the longitudinal velocity at the center of mass are input to the unmanned vehicle as control quantities to control its driving direction and speed, thereby improving the tracking control accuracy of the unmanned vehicle. The concrete steps of the inventive method are as follows...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More