Three-connecting-rod manipulator finite time fault detection method based on singular system model
A finite-time, singular system technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of not considering the influence of system time delay and the inability to describe the state space model in a unified manner, and achieve practical significance, simplicity and simplicity. Easy to achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
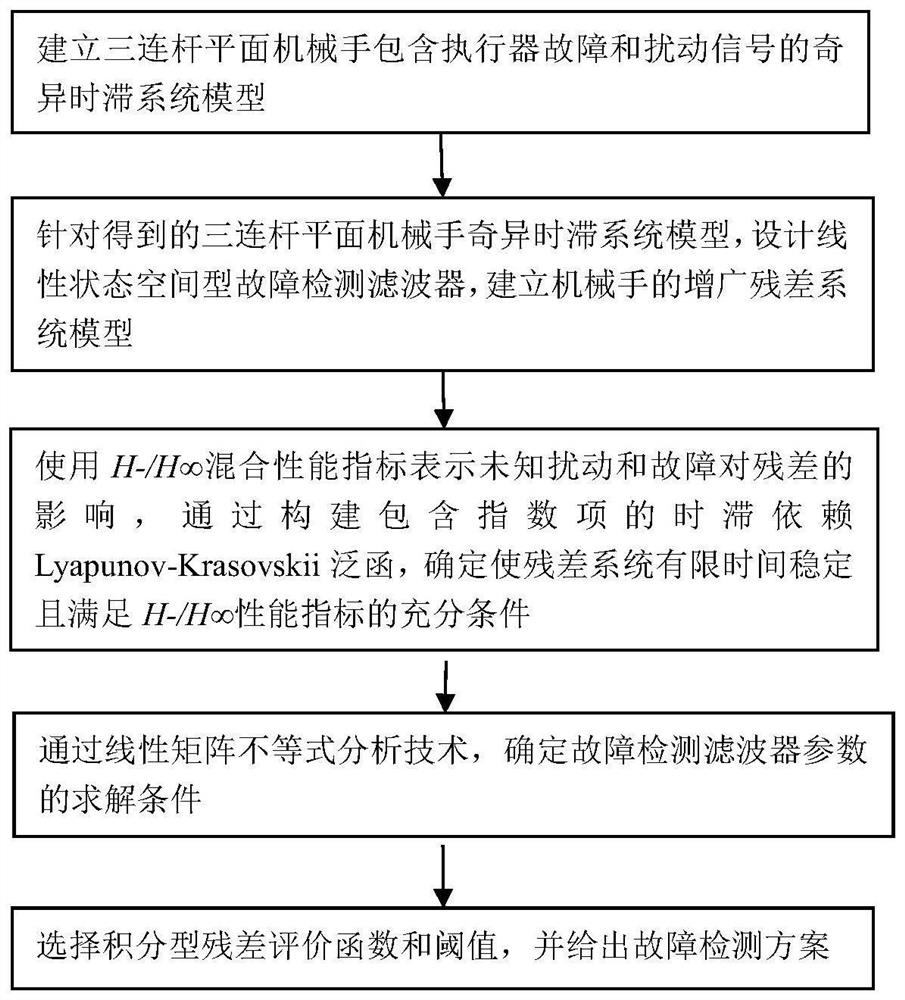
[0043] Such as Figure 1 to Figure 3 As shown, the finite-time fault detection method of the three-link manipulator based on the singular system model includes the following steps:
[0044]Step 1: Establish the nonlinear dynamic model of the three-link planar manipulator in the joint coordinate system, and convert it into a singular linear system model in the Cartesian coordinate system. Considering the actuator failure and unknown disturbance and adding the time delay item, the three The singular time-delay system model of the connecting rod planar manipulator includes the following process:
[0045] 1.1 Establish the nonlinear dynamic model of the three-link planar manipulator in the joint c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More