

Extraterrestrial unknown environment beyond visual range global path planning system and method
A global path planning and unknown environment technology, applied in the field of mobile detector/robot path planning system, can solve the problem that the target point of path planning is beyond the effective line of sight, the global path planning cannot be performed, and the range of restored terrain is limited. Achieve good results, easy to implement, high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0084] The invention provides a long-distance path planning system and method for a robot in an unknown environment.
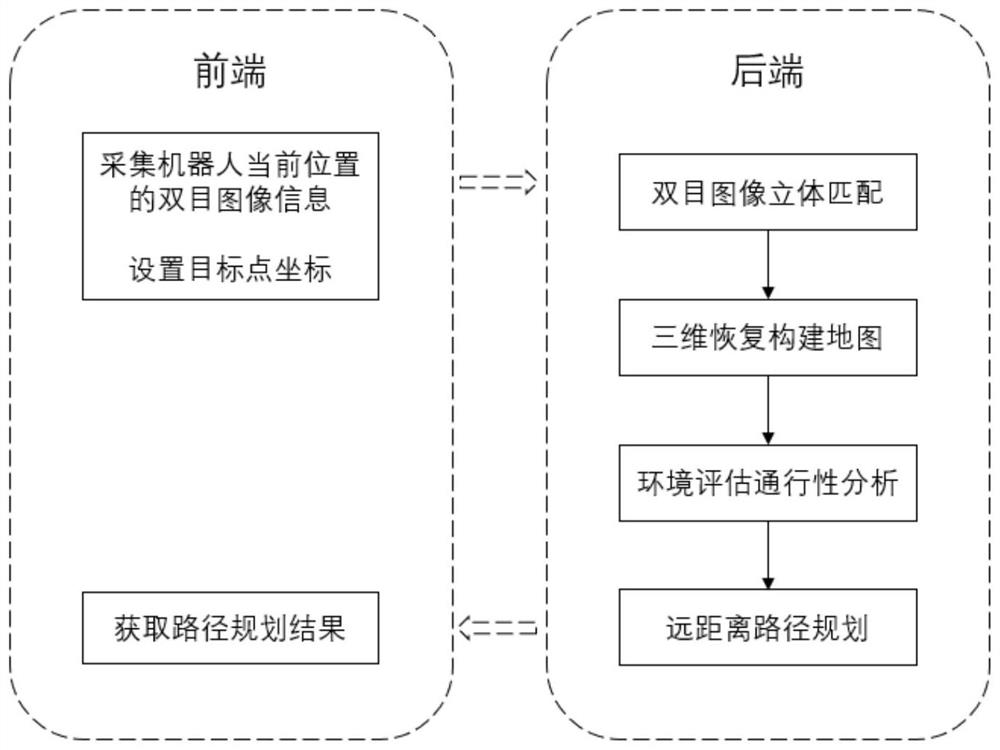
[0085] refer to figure 1 , figure 1 It is a schematic flowchart of an embodiment of the robot path planning method of the present invention. In this embodiment, the path planning method of the robot includes:
[0086] (1) The front-end module acquires binocular image information;
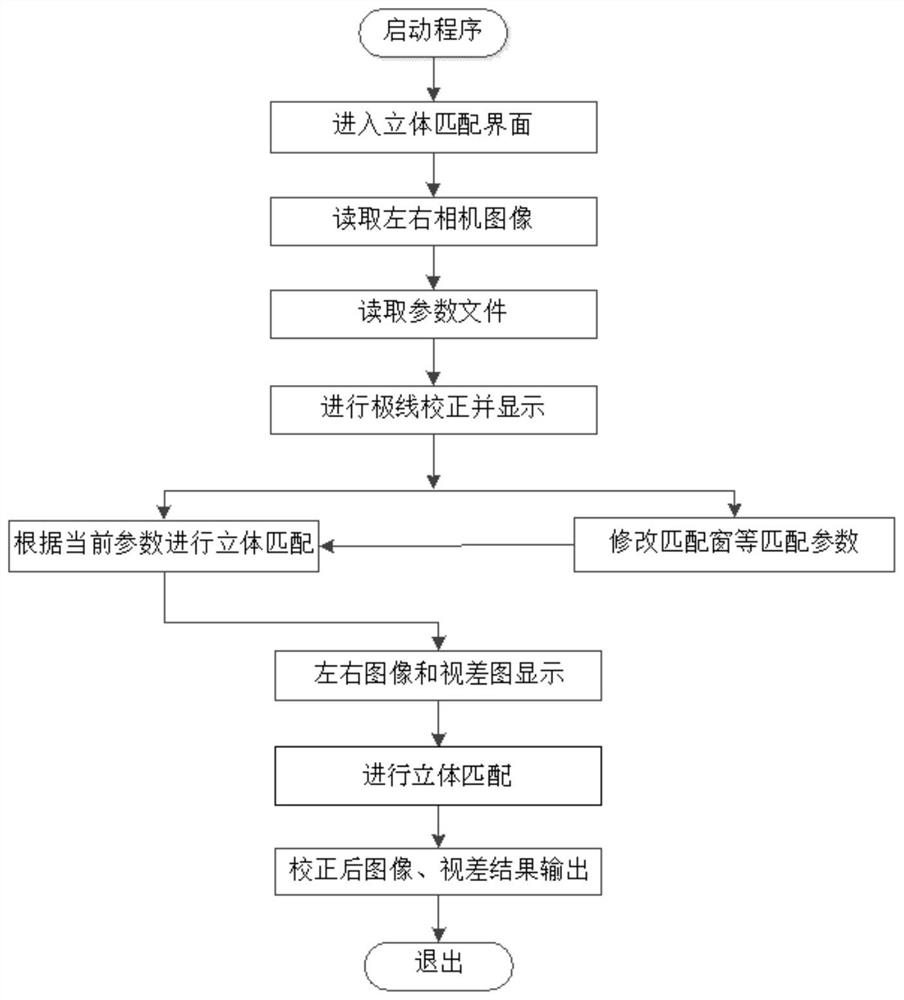
[0087] (2) The back-end module performs stereo matching on binocular images, and the specific steps are: perform epipolar correction and matching on binocular image pairs, and extract disparity information; refer to figure 2 Specifically, the stereo matching step of the binocular image includes: selecting a camera parameter file, which includes epipolar correction parameters and stereo matching parameters; performing epipolar correction according to the read-in binocular image and camera parameters; The disparity data is filtered to generate a disparity map; the result of the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More