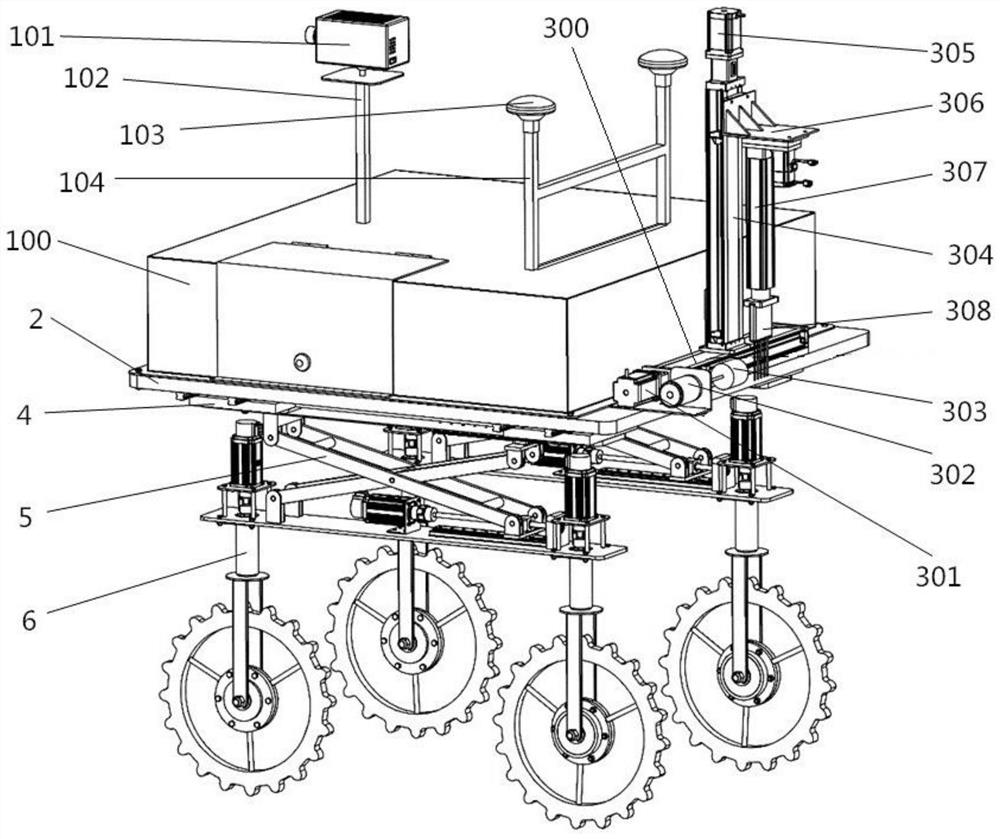
Farmland information acquisition robot with adjustable ground clearance and wheel track and information acquisition method
A technology of information collection and robotics, which is applied in the field of agricultural robots, can solve the problems of high labor intensity, low work efficiency, and high labor costs, and achieve the effect of improving the degree of refinement, improving output and quality, and promoting rapid transformation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
[0039] In the description of the present invention, it should be understood that the orientation or positional relationship indicated by the terms "front", "front end", "rear", "rear end", "upper" and "lower" are based on the drawings The orientations or positional relationships shown are only for the convenience of describing the present invention, but do not indicate or imply that the referred device or element must have a specific orientation, be constructed and operated in a specific orientation, and thus should not be construed as limiting the present invention. The terms "installation", "connection" and "fixation" should be interpreted in a broad sense, for example, it can be a fixed connection, a detachable connection, or an integrated connection, which can be direc...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap