Intelligent control method of photovoltaic module cleaning robot
A technology for cleaning robots and photovoltaic modules, applied in cleaning methods and appliances, chemical instruments and methods, photovoltaic power generation, etc., can solve problems such as high energy consumption and insufficient cleaning control, and achieve reduced control steps, convenient cleaning, and reduced energy consumption. consumption effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
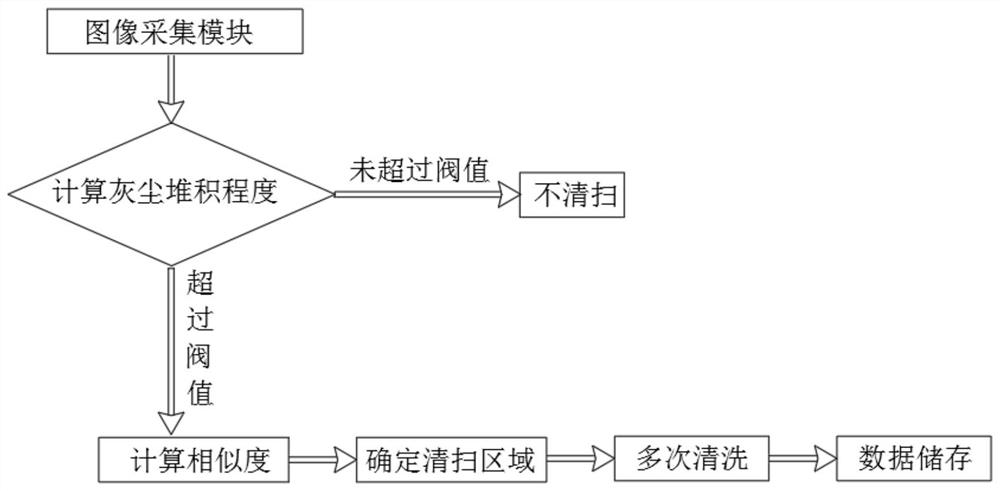
[0030] refer to figure 1 , an intelligent control method for a photovoltaic module cleaning robot, comprising the following steps:
[0031] S1: Image acquisition module, the image acquisition module includes an image acquisition device, the image acquisition device is set on one side of the photovoltaic module, the image acquisition device collects the image of the photovoltaic module in a clean state, and takes this image as the initial image, and then the image acquisition device intermittently Obtain a collection of reference images permanently;
[0032] S2: To calculate the degree of dust accumulation, first collect the maximum open circuit voltage and short circuit current Voc1, Isc1 of the photovoltaic module in the initial image state, and the maximum open circuit voltage and short circuit current Voc2, Isc2 of the Guangzu module in the reference image state in the set of reference images, After collection, pre-set the dust accumulation degree threshold, and then calcu...
Embodiment 2
[0040] refer to figure 1 , an intelligent control method for a photovoltaic module cleaning robot, comprising the following steps:
[0041] S1: Image acquisition module, the image acquisition module includes an image acquisition device, the image acquisition device is set on one side of the photovoltaic module, the image acquisition device collects the image of the photovoltaic module in a clean state, and takes this image as the initial image, and then the image acquisition device intermittently Obtain a collection of reference images permanently;
[0042]S2: To calculate the degree of dust accumulation, first collect the maximum open circuit voltage and short circuit current Voc1, Isc1 of the photovoltaic module in the initial image state, and the maximum open circuit voltage and short circuit current Voc2, Isc2 of the Guangzu module in the reference image state in the set of reference images, After collection, pre-set the dust accumulation degree threshold, and then calcul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More