

Robot multi-fingered dexterous hand
A robot and skillful hand technology, applied in the field of manipulators, can solve problems such as high cost, complex assembly and manufacturing process, and achieve the effects of controlling production costs, reducing installation size requirements, and facilitating assembly and post-assembly maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings.
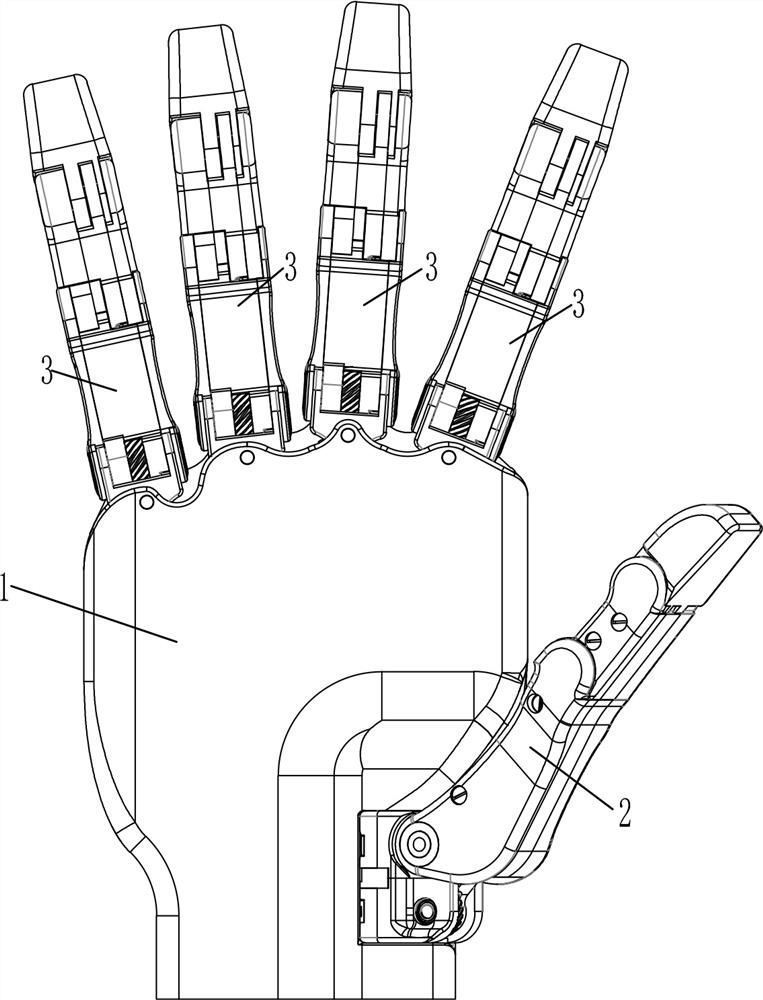
[0036] Such as figure 1 As shown, a multi-fingered dexterous hand of a robot includes a palm 1, a thumb structure 2 and a plurality of auxiliary finger structures 3. In the present invention, the auxiliary finger structures 3 are four, and each auxiliary finger structure 3 is independently arranged. Of course, the auxiliary finger structure 3 may also be other than two or more.
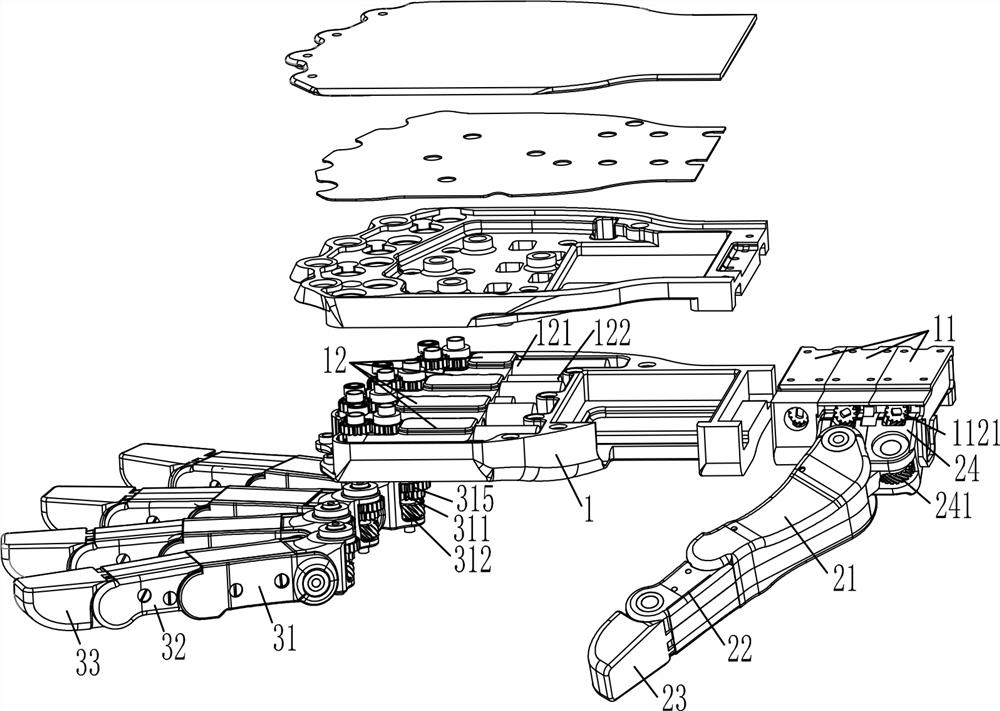
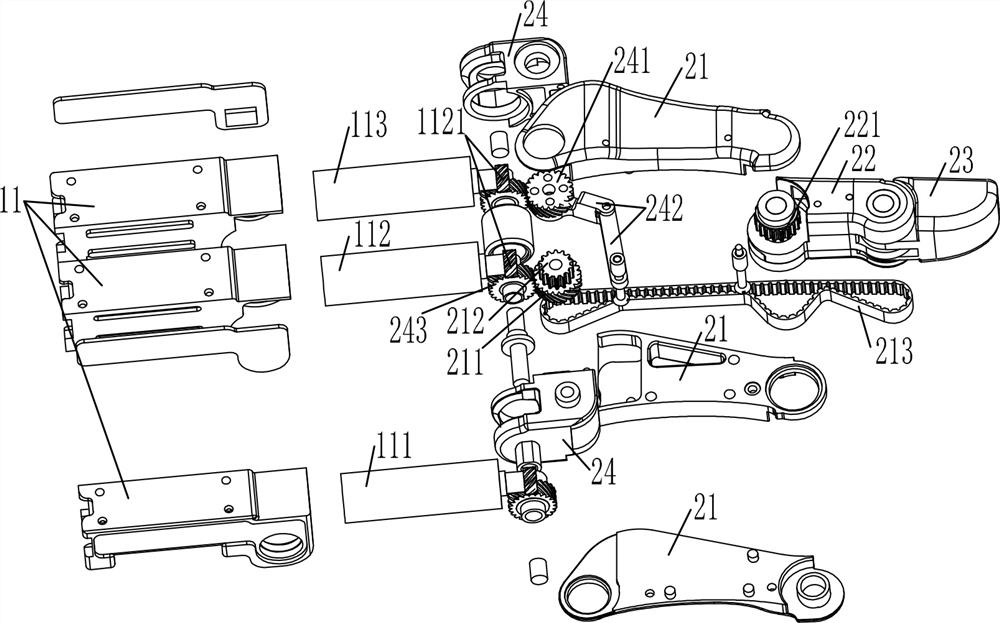
[0037] Such as Figure 2-6 As shown, the thumb can perform retraction movement, bending movement and flexion and extension movement relative to the palm part 1. The thumb structure 2 includes a first thumb part 21, a second thumb part 22, a retraction mechanism, a bending mechanism I and Flexion and extension mechanism, the retraction mechanism is used to drive the thumb to perform retraction movement relative to the palm 1 (that is, the thumb structure 2 rotates up and down relative to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More