

Ship position and speed deviation correction method, device and system
A speed deviation and ship technology, which is applied in the field of ship position and speed deviation correction, can solve problems such as false alarms, missed alarms in submarine cable monitoring systems, and large error ranges of radar signal positions, so as to reduce errors and solve missed alarms or false alarms. The effect of the alarm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
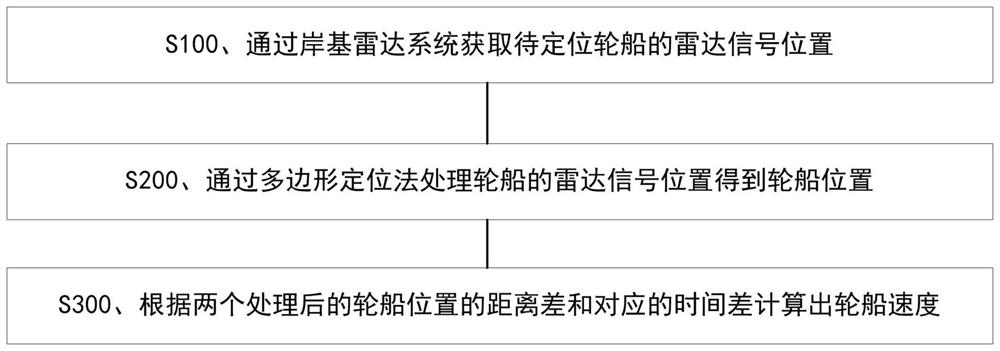
[0051] Such as figure 1 As shown, the ship position and speed deviation correction method includes the following steps:
[0052] S100. Obtain the radar signal position of the ship to be positioned through the shore-based radar system;
[0053] S200. Process the radar signal position of the ship through the polygon positioning method to obtain the position of the ship;
[0054] S300. Calculate the speed of the ship according to the distance difference between the two processed ship positions and the corresponding time difference.
[0055] Among them, the shore-based radar system refers to a radar system installed at a fixed location such as an ocean coast or an island.
[0056] Wherein, the radar signal position refers to the signal position of the ship acquired by the shore-based radar system, and there is a certain error between the position and the actual ship position.
[0057] Among them, the polygon positioning method refers to marking the positions of multiple radar s...
Embodiment 2
[0063] On the basis of Embodiment 1, the present embodiment provides two implementation schemes for obtaining the position of the ship by processing the radar signal position of the ship through the polygon positioning method, and one of the two implementation schemes can be selected arbitrarily, as follows:
no. 1 approach
[0064] In the first embodiment, the obtaining the position of the ship by processing the radar signal position of the ship through the polygon positioning method comprises the following steps:
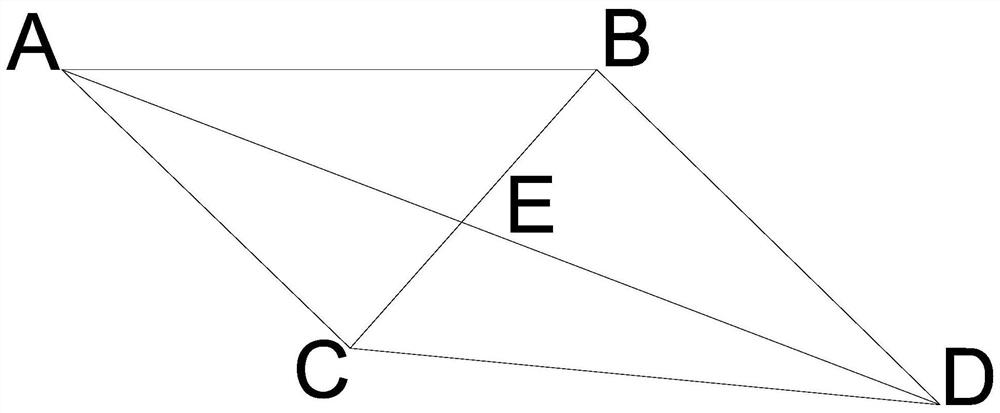
[0065] S201. Form four radar signal positions on the plane according to the radar signal positions of the ship reported four times in a row, and connect the four radar signal positions to form a quadrilateral;
[0066] S202. Connect the diagonals of the quadrilaterals to obtain a first intersection point, and the first intersection point is used as the position of the ship.
[0067] Combine below figure 2 The first embodiment of the polygon positioning method is further illustrated:
[0068] According to the radar signal position of the ship reported four times consecutively by the radar, four radar signal positions are formed on the plane, which are marked as four points A, B, C, and D respectively, and four points A, B, C, and D are connected to form A quadrilateral M; connect the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More