

Industrial forging robot multifunctional clamping manipulator
A robotic and multi-functional technology, applied in forging/pressing/hammering machinery, manufacturing tools, metal processing equipment, etc., can solve problems such as single clamping method, single function, and insufficient clamping effect, and achieve convenient removal , Easy installation, firm clamping effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
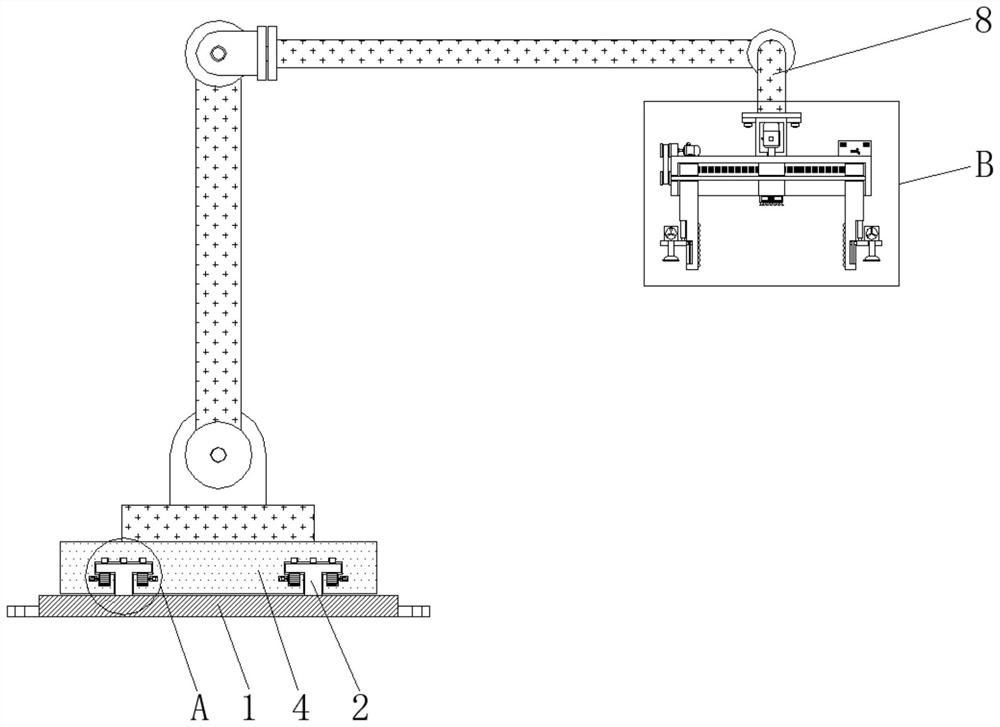
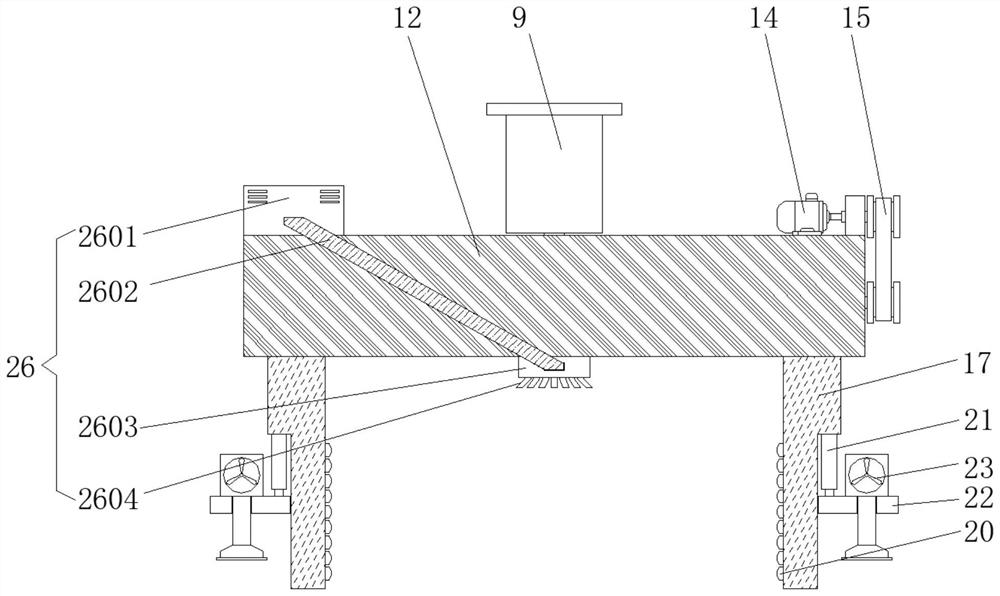
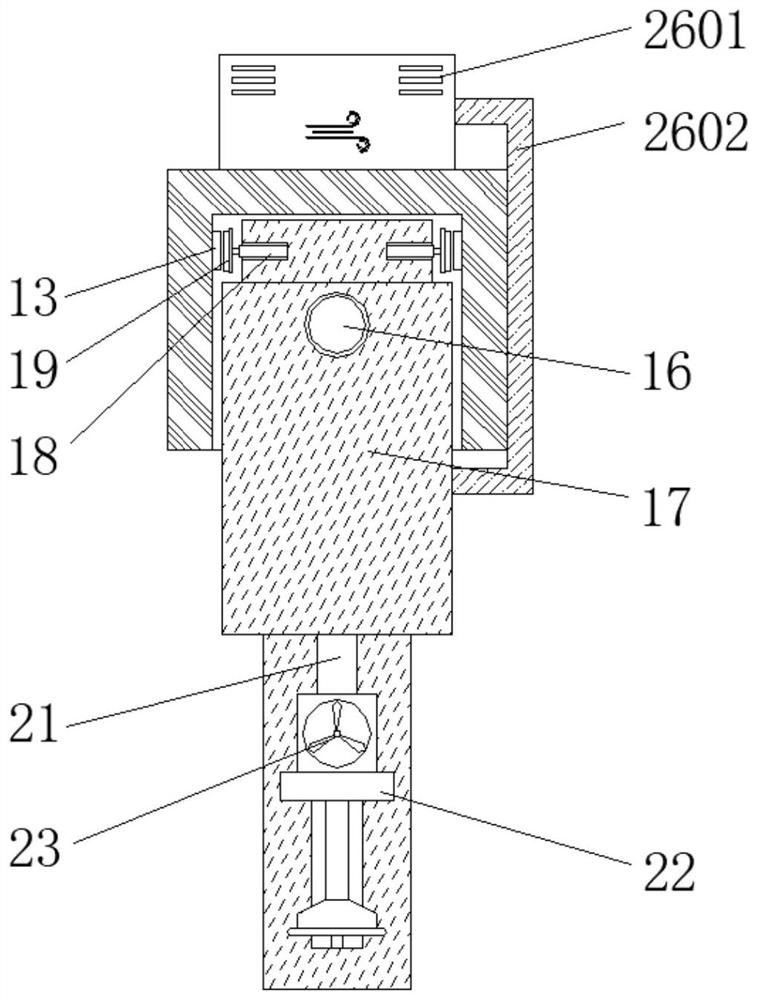
[0039] see Figure 1-7 , the present invention provides a technical solution: a multifunctional clamping manipulator for an industrial forging robot, according to figure 1 , figure 2 and image 3 As shown, the upper end surface of the base 1 is slidably connected with a movable seat 4, and the top of the movable seat 4 is fixed with a mechanical arm 8, and the end of the mechanical arm 8 is fixed with a motor box 9 by bolts, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More