

Autonomous underwater vehicle positioning method based on water buoy
A technology for underwater vehicles and positioning methods, applied in satellite radio beacon positioning systems, positioning, instruments, etc., can solve problems such as difficulties in placing and recovering transponders, high-precision equipment, etc., and achieve convenient and flexible deployment Effects of usage, flexibility and diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
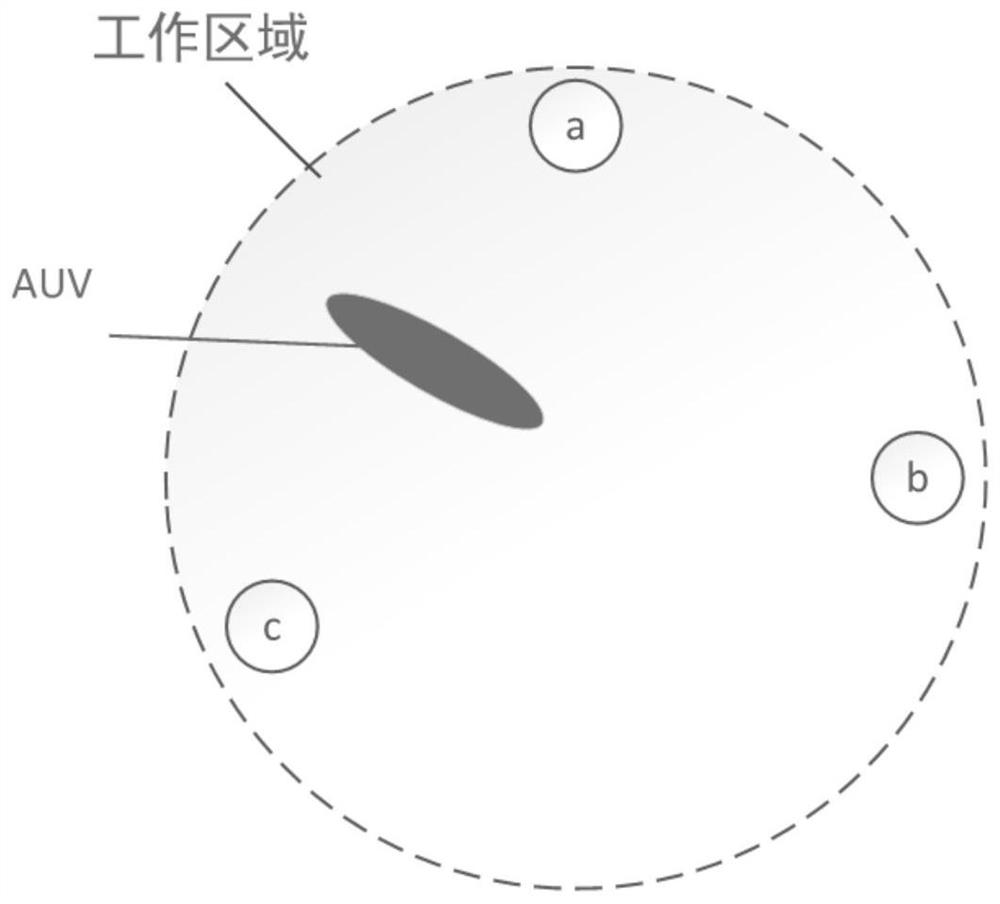
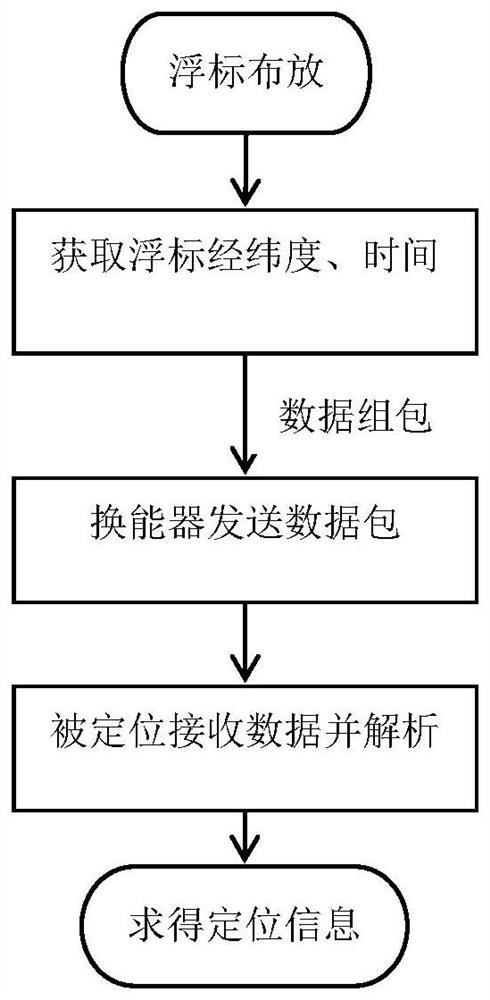
[0054] A method for positioning autonomous underwater vehicles based on water buoys in this embodiment, such as figure 1As shown, when the vehicle reaches a certain operation area, the buoy is released, and the underwater vehicle receives the data packet sent by the transducer of the buoy floating to the water surface, which contains the latitude and longitude information of the buoy and the UTC time. After receiving the data sent by the buoy method, the transducer of the positioned target AUV transmits the signal to the processor of the aircraft and analyzes and calculates the data, finally obtaining the positioning information of the aircraft.
[0055] This embodiment specifically includes the following steps:
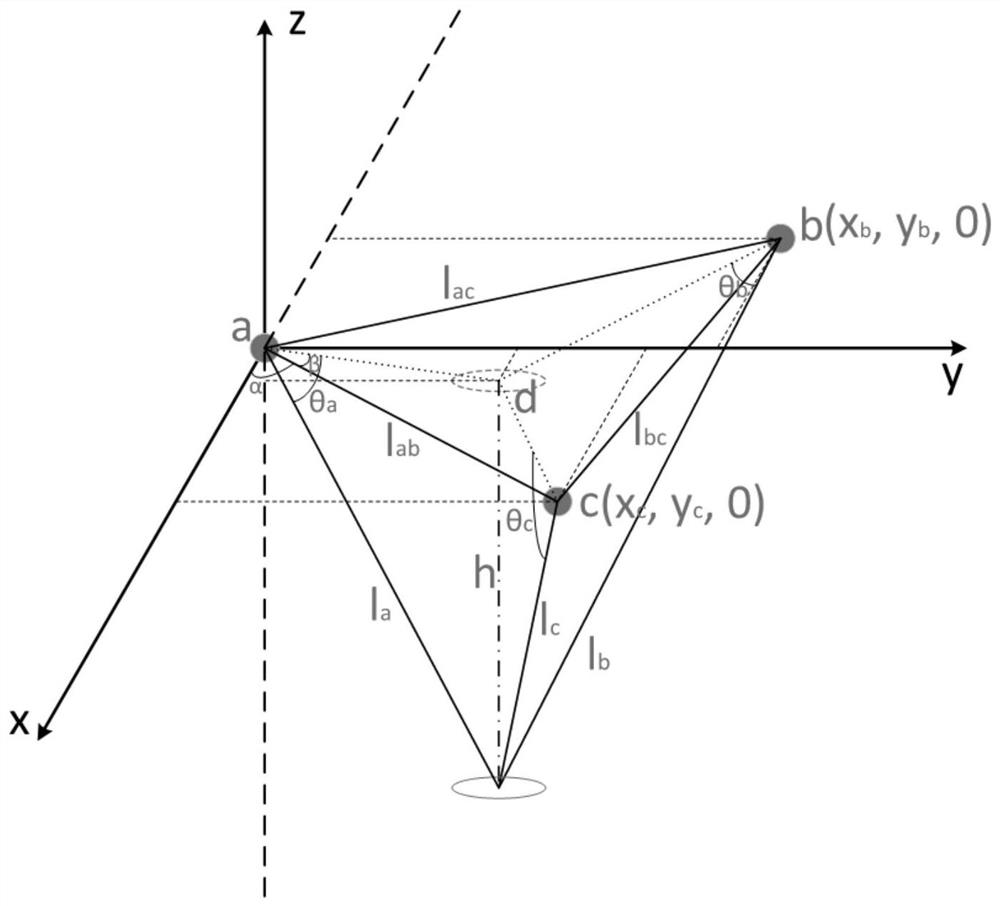
[0056] Step 1: Place the three water buoys a,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More