

Passive wearable lower limb exoskeleton robot with three-stage limiting support
An exoskeleton robot and limit support technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems affecting the work efficiency, product quality and professional life of technicians, non-passive multi-level adjustable exoskeleton robots, Workers' leg joint fatigue damage and other problems can be improved to improve the efficiency and quality of manual work, reduce human fatigue damage and work intensity, and ensure wearability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further introduced below in conjunction with the accompanying drawings and specific embodiments.
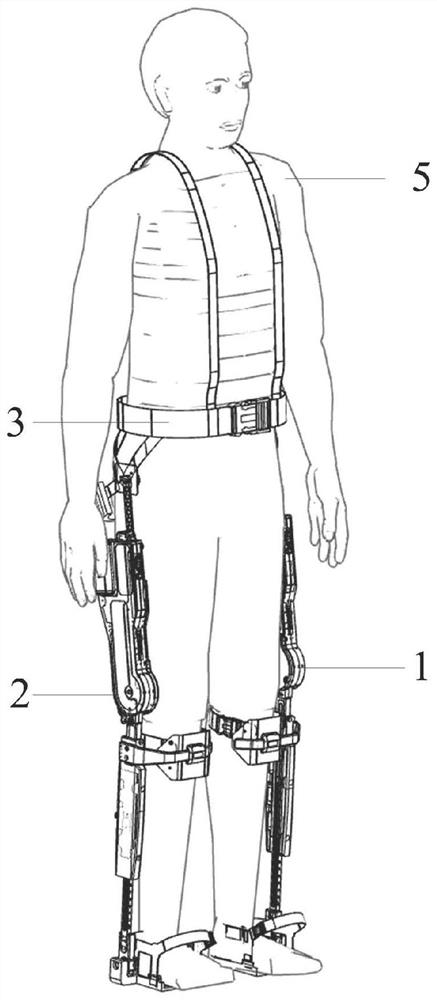
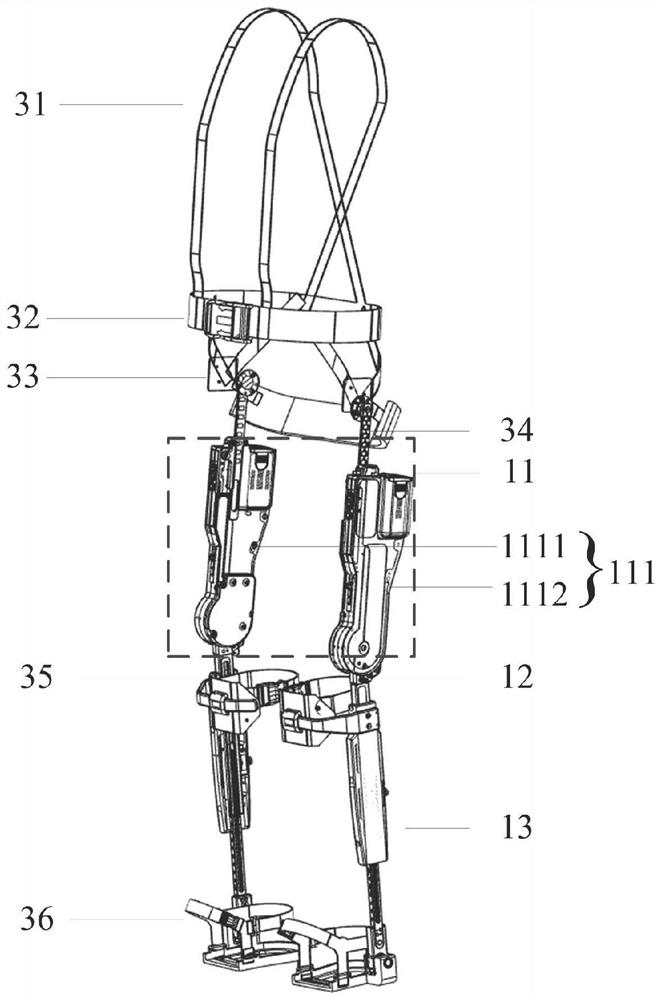
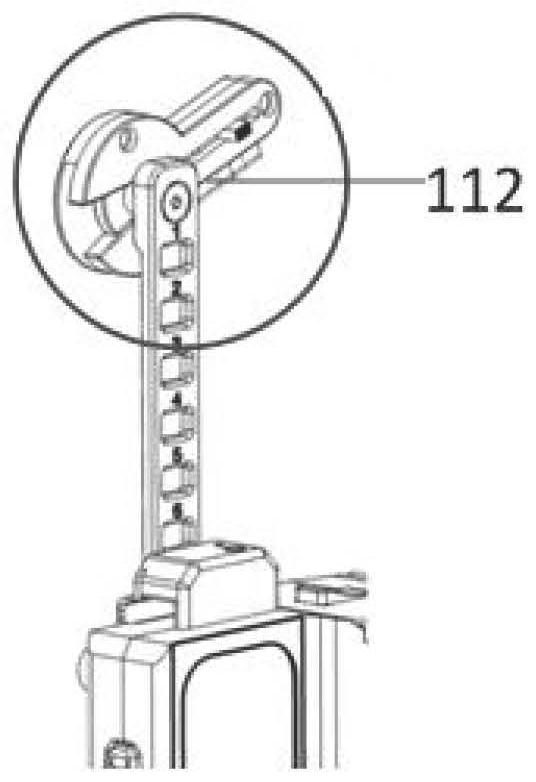
[0025] to combine Figure 1-Figure 12 , a passive wearable lower extremity exoskeleton robot with three-level limit support in this embodiment, including a left lower extremity exoskeleton 1, a right lower extremity exoskeleton 2 and a man-machine fixing strap 3, the left lower extremity exoskeleton 1 and the The right lower extremity exoskeleton 2 has the same structure and is symmetrically arranged, and can be worn on the human lower extremity through the man-machine fixing strap 3. The left lower extremity exoskeleton 1 includes a thigh part 11, a knee joint 12 and a calf part 13. The thigh The part 11 rotates around the knee joint 12 relative to the lower leg part 13, and the thigh part includes a thigh shell 111, a suspension mechanism 112, a thigh length adjustment mechanism 116 and a posture adjustment module 117, and the posture adjust...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More