

Unmanned aerial vehicle cluster target number detection method based on multi-sensor data fusion
A technology of target quantity and data fusion, applied in the field of information processing, can solve problems such as the impact of the evaluation of defense strategy defense effects, difficult number of UAV cluster targets, complex shape of the fleet, etc., to reduce decision-making risks, strong compatibility and reliability Operability, the effect of simple algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0030] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with specific embodiments.
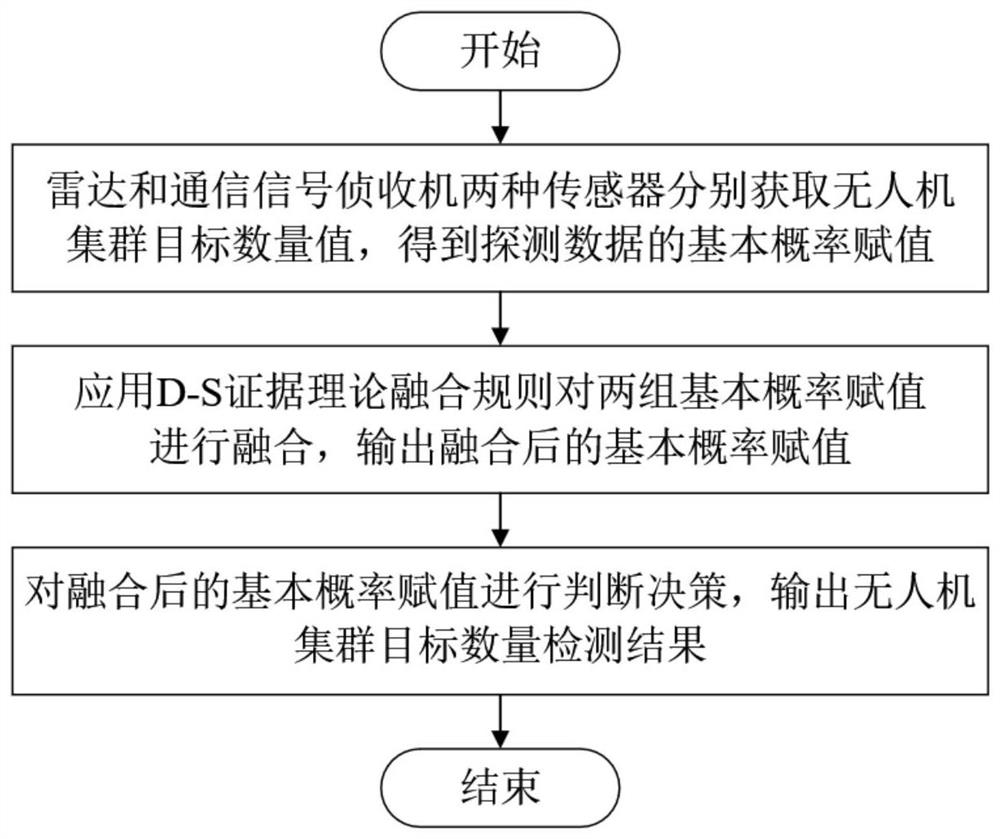
[0031] The embodiment of the present invention provides a method for detecting the number of UAV cluster targets based on multi-sensor data fusion. The sensors include radar and communication signal receivers. The method flow chart of the present invention is as follows figure 1 As shown, it mainly involves the basic probability assignment of the number of UAV cluster targets given by the radar and communication signal receivers, and the detection result of the number of UAV cluster targets is output through the D-S data fusion algorithm and the judgment algorithm.
[0032] Step 1, taking the detection of a UAV cluster with a certain number of objects as an example, two sensors, radar and communication signal receiver, respectively obtain the target qu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More