

Multi-point laser ranging distributed robot calibration system and method
A multi-point laser, calibration system technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
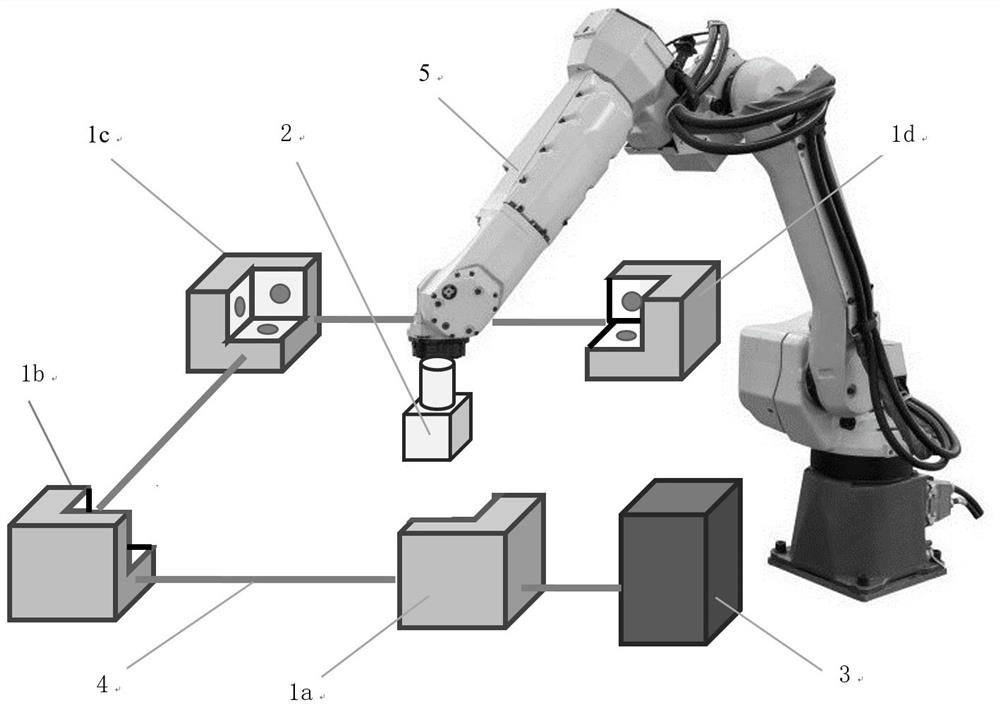
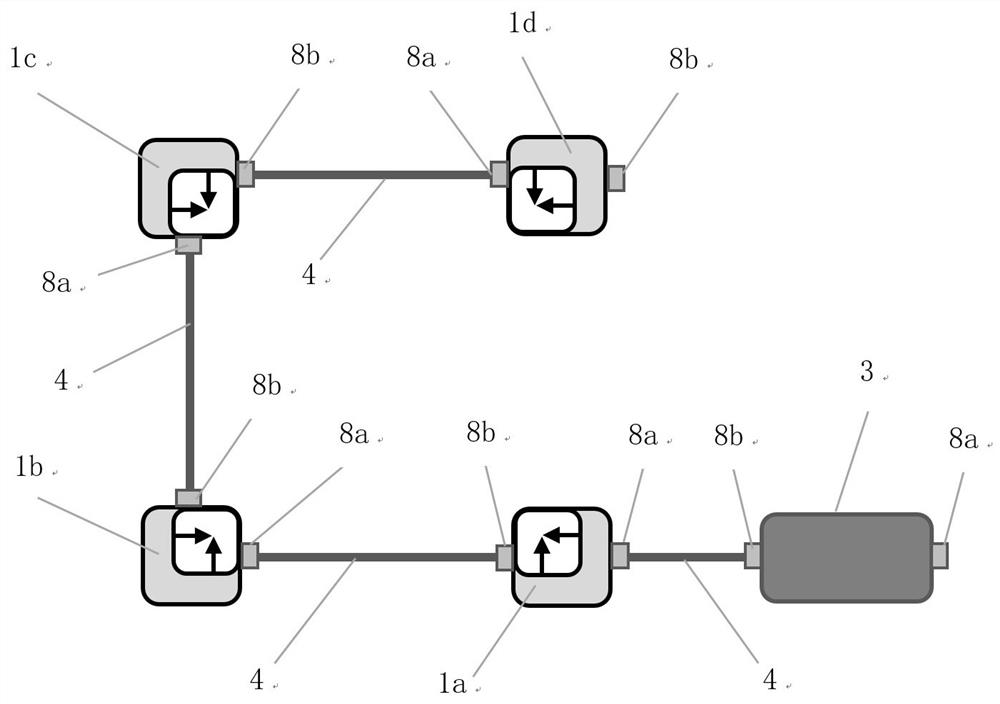
[0032] The special feature of the multi-point laser ranging distributed robot calibration system of the present invention is that the calibration system is composed of a calibrator 1, a reflector 2, a controller 3, and a cable 4, such as figure 1 shown, where:
[0033] The calibrator 1 has multiple, for example figure 1 There are 4 calibrators in , and the distribution is 1a, 1b, 1c and 1d; all calibrators 1 are distributed and installed in multiple different positions in the working space of the robot 5, for example figure 1 The four calibrator 1a, 1b, 1c and 1d ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More