

Visual carrier landing guiding method and system for unmanned rotorcraft
A guidance system and unmanned rotor technology, applied in the aerospace field, can solve the problems that affect the stability of UAV landing and the data link electromagnetic signal is susceptible to external interference, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
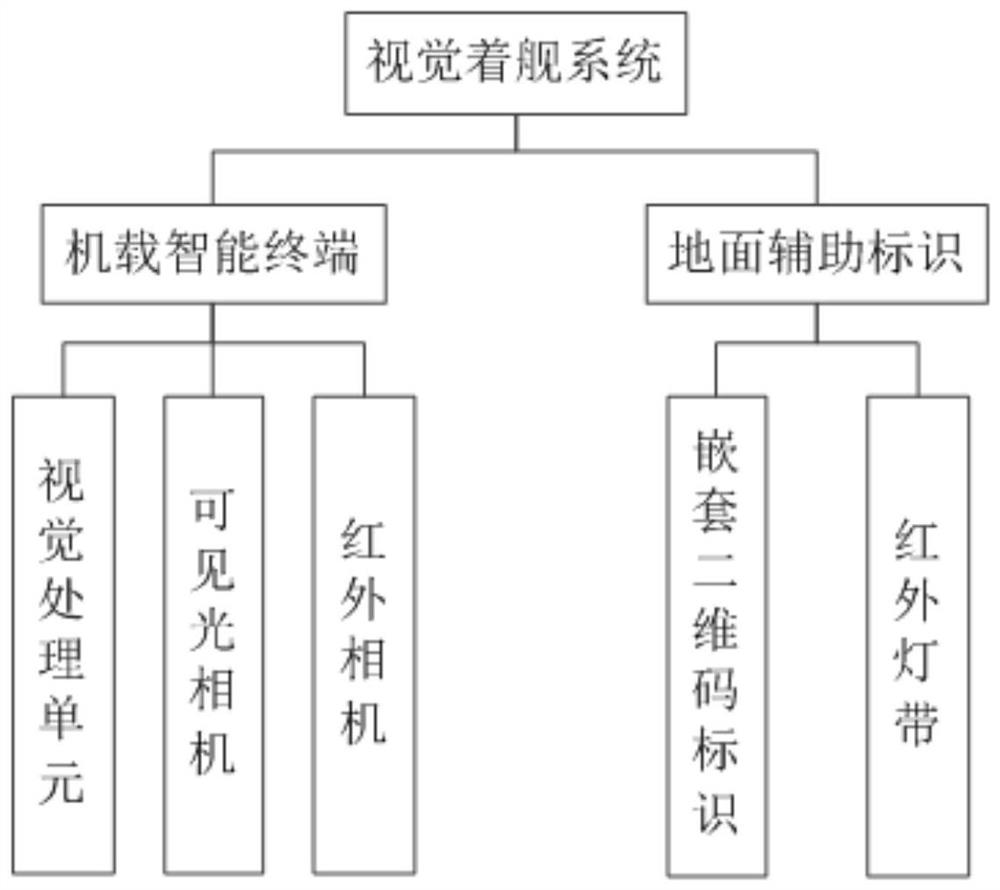
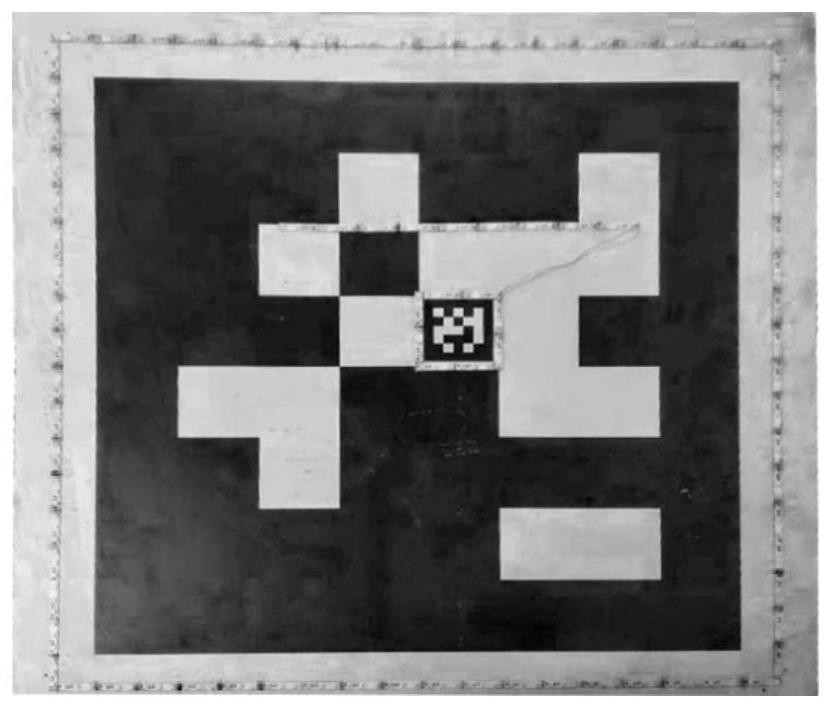
[0028] to combine figure 2 As shown, this embodiment provides a rotary-wing UAV visual landing guidance system, including an airborne intelligent terminal and ground auxiliary identification; the airborne intelligent terminal includes a visual processing unit, a visible light camera and an infrared camera. Ground auxiliary signs include nested two-dimensional code signs and infrared light strips around the two-dimensional code signs. Nested two-dimensional code signs include inner two-dimensional codes and outer two-dimensional codes. The inner two-dimensional code is nested in the outer layer. QR code.
[0029] The visible light camera or the infrared camera is used to obtain the image information of the ground auxiliary marking in real time and send it to the vision processing unit.
[0030] The visual processing unit compares the received image information with the target image library in the visual processing unit, obtains the speed required for the landing of the drone ...
Embodiment 2
[0037] This embodiment provides a visual landing guidance method for a rotary-wing unmanned aerial vehicle, using the above-mentioned landing guidance system, the guidance method includes:
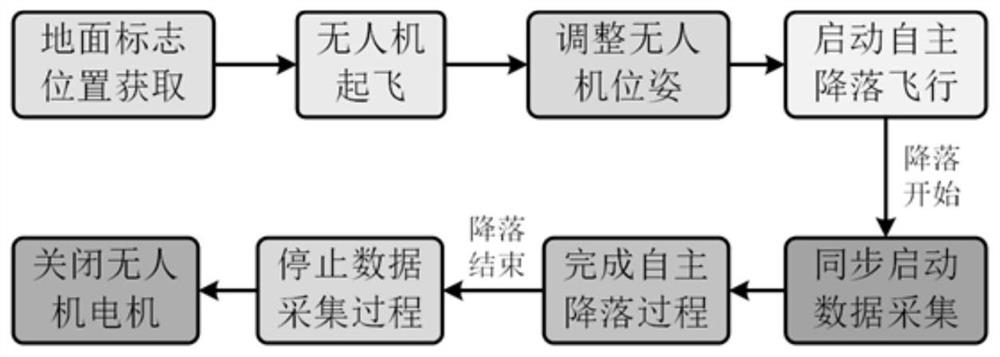
[0038] Step 1: Collect a large number of target images in the landing area through visible light cameras and infrared cameras, and establish a training library of target images in the landing area; the data contained in the target images in the landing area include image data of the ground environment and landing platform environment; the acquisition process covers different time, different lighting conditions and different background environments. The image acquisition process is as figure 1 shown.
[0039] Step 2: For each image collected in the target image training library, calibrate the speed corresponding to the rotor drone at the time of each image collection, as the label data; the speed includes υ x, υ y , υ z , ω z , are the linear velocity in the heading x, longitudinal y, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More