Three-dimensional target detection method fusing monocular camera and laser radar
A laser radar, three-dimensional target technology, applied in neural learning methods, computer parts, character and pattern recognition, etc., can solve the problem of reduced recognition effect, achieve good prediction, improve accuracy, and improve the effect of robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
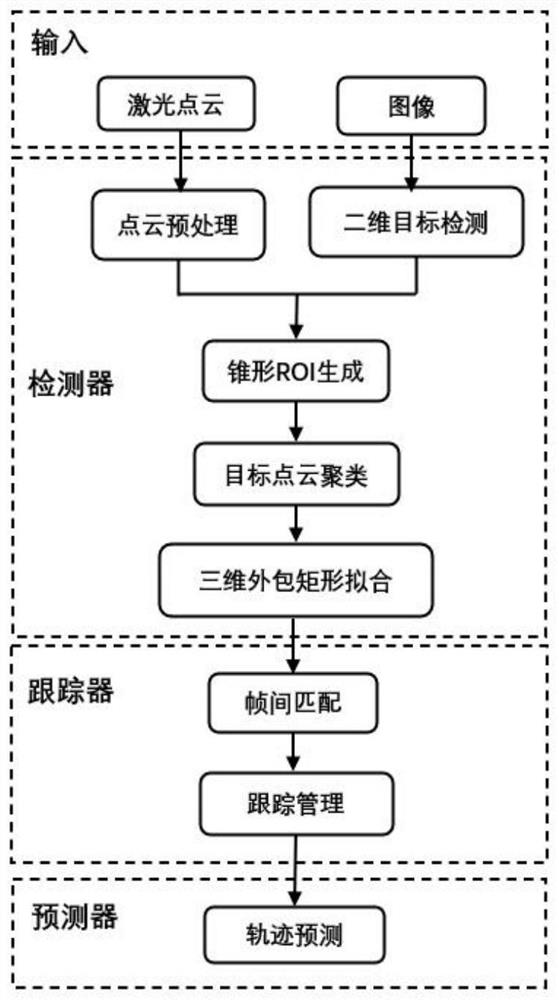
[0054] The present invention provides a three-dimensional target detection method that combines a monocular camera and a laser radar, including three stages of target detection, target tracking and trajectory prediction. In the target detection stage, the laser radar and the camera are first registered, and the laser radar and The spatial position relationship of the camera, and then preprocess the point cloud, use the YOLOv4 target detection algorithm to obtain a two-dimensional outsourcing rectangle on the image, and generate a three-dimensional cone sense corresponding to the two-dimensional outsourcing rectangle according to the projection relationship between the point cloud and the image In the region of interest, finally cluster the point cloud in the 3D cone-shaped region of interest and fit the 3D outsourcing rectangle to realize the detection of the target; in the target tracking stage, the detected target is matched between frames based on the DeepSORT algorithm, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com