

Tomato picking robot capable of self-adapting to different heights
A picking robot and self-adaptive technology, applied in picking machines, applications, harvesters, etc., can solve the problems of inconvenient disassembly, high cost, high labor intensity, etc., and achieve the effect of convenient disassembly and replacement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
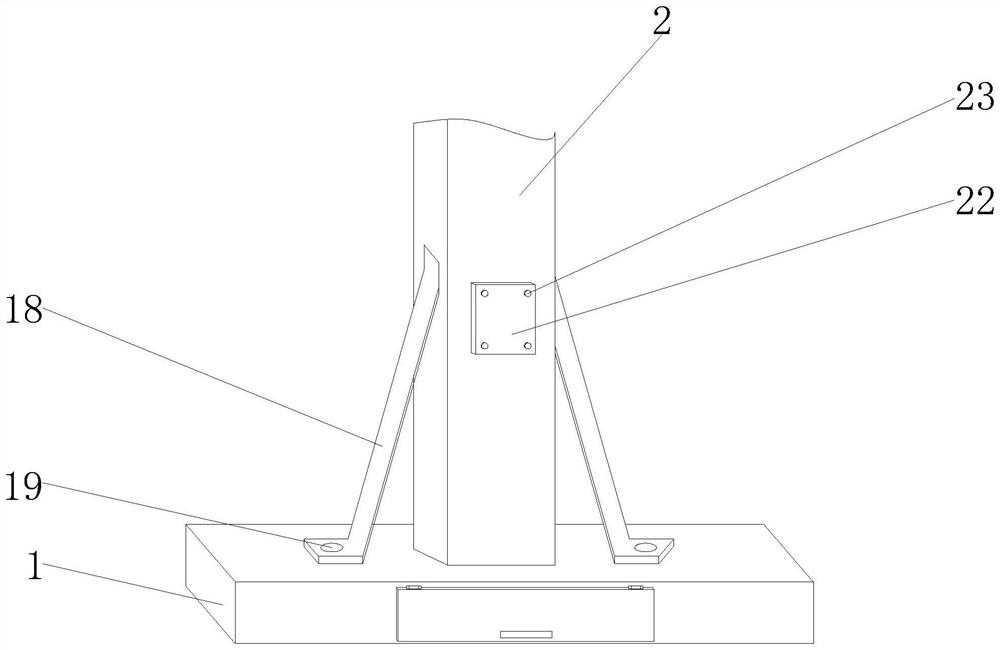
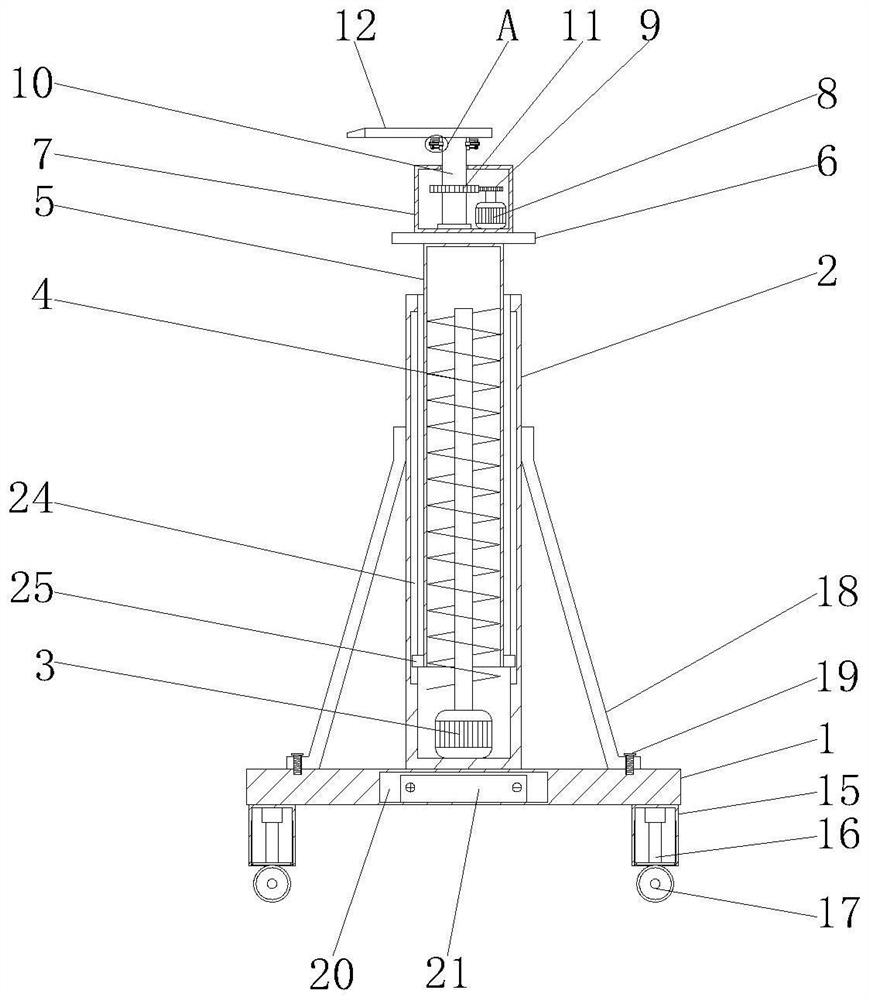
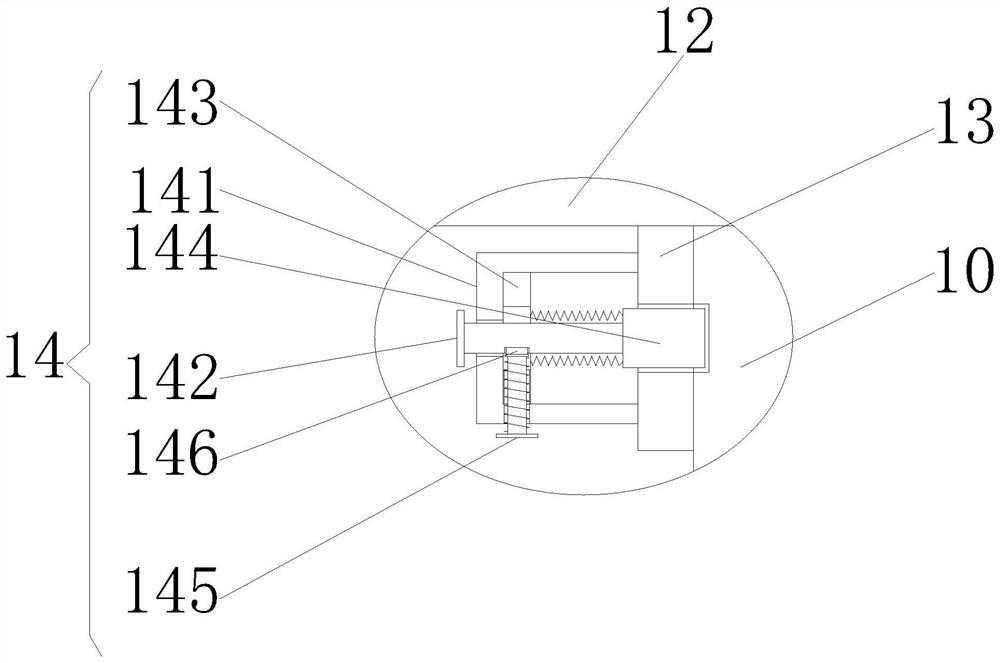
[0019] Such as Figure 1-Figure 3 As shown, a tomato picking robot that can adapt to different heights provided by the present invention includes a base 1, a support rod 2 is arranged on the top of the base 1, and a first motor 3 is fixedly connected to the bottom of the inner cavity of the support rod 2. The top of the motor 3 is fixedly connected with a threaded rod 4, the surface of the threaded rod 4 is covered with a threaded pipe 5, the top of the threaded pipe 5 extends to the outside of the support rod 2, and the top of the threaded pipe 5 is fixedly connected with a horizontal plate 6, the horizontal plate The top of 6 is fixedly connected with a placement box 7, the right side of the inner cavity of the placement box 7 is fixedly connected with a second motor 8, the top of the second motor 8 is fixedly connected with a first gear 9, and the inside of the placement box 7 is provided with a connecting rod 10 , the bottom of the connecting rod 10 is movably connected wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More