

Visual positioning method and system of unmanned aerial vehicle
A technology for visual positioning and drones, which is applied in image data processing, instruments, calculations, etc., can solve the problems of difficult to distinguish the position of drones, low accuracy of positioning methods, poor stability, etc., and achieve the goal of visual positioning Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0053] The principles and features of the present invention will be described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
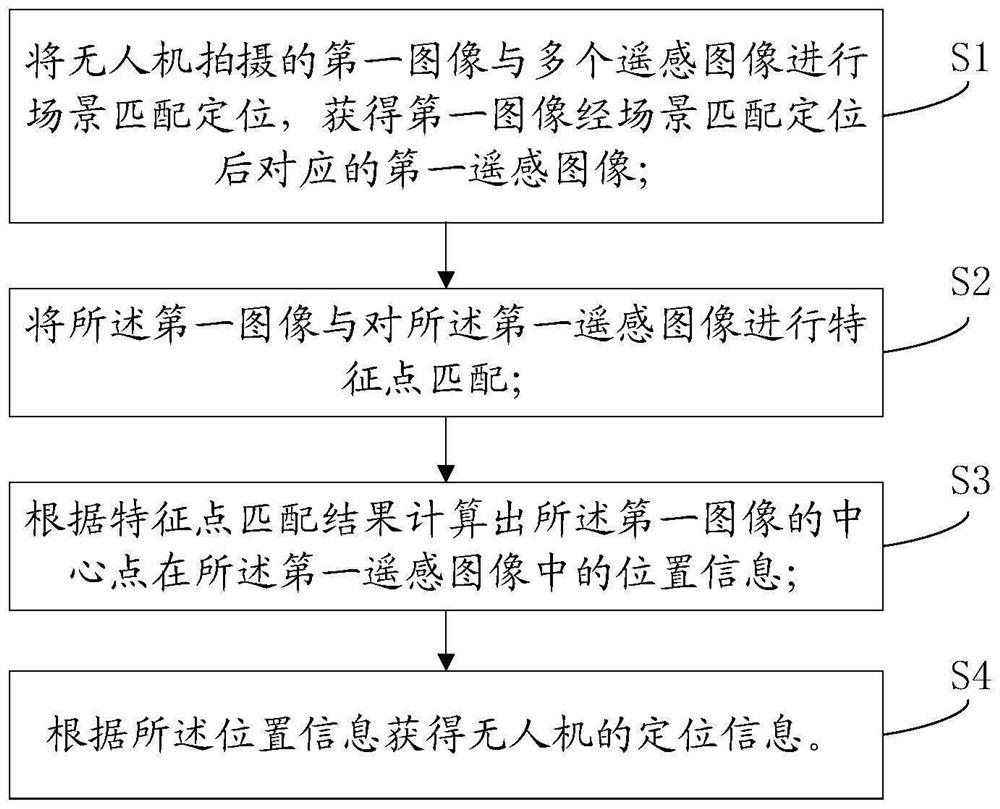
[0054] Such as figure 1 As shown, a visual positioning method for a drone provided in an embodiment of the present invention includes:
[0055] S1, performing scene matching and positioning on the first image captured by the UAV and multiple remote sensing images, and obtaining the corresponding first remote sensing image after the scene matching and positioning of the first image;
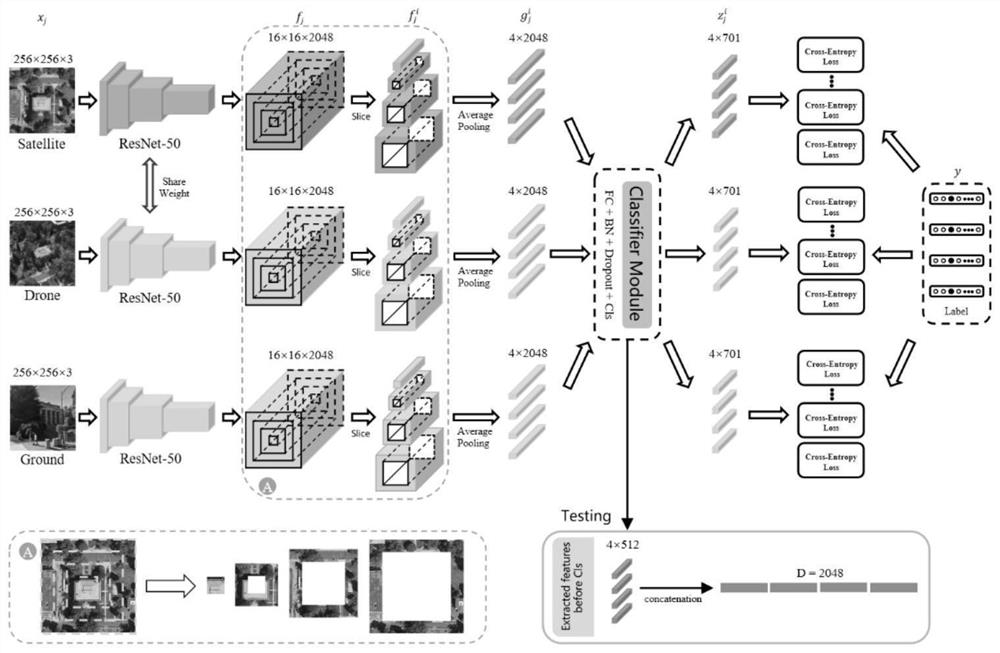
[0056] In a certain embodiment, the LPN algorithm is used to extract and classify the features of the UAV image and the remote sensing image, and find the best matching remote sensing image for each UAV image to realize scene positioning.
[0057] In another embodiment, scene positioning may include: firstly, the input UAV pictures...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More