

Flexible speed planning and displacement compensation method for laser cutting
A displacement compensation and laser cutting technology, applied in general control systems, program control, instruments, etc., can solve the problems of complex and cumbersome processes, inability to achieve efficient execution, etc., and achieve the effects of efficient execution, smooth and soft movements, and accurate precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
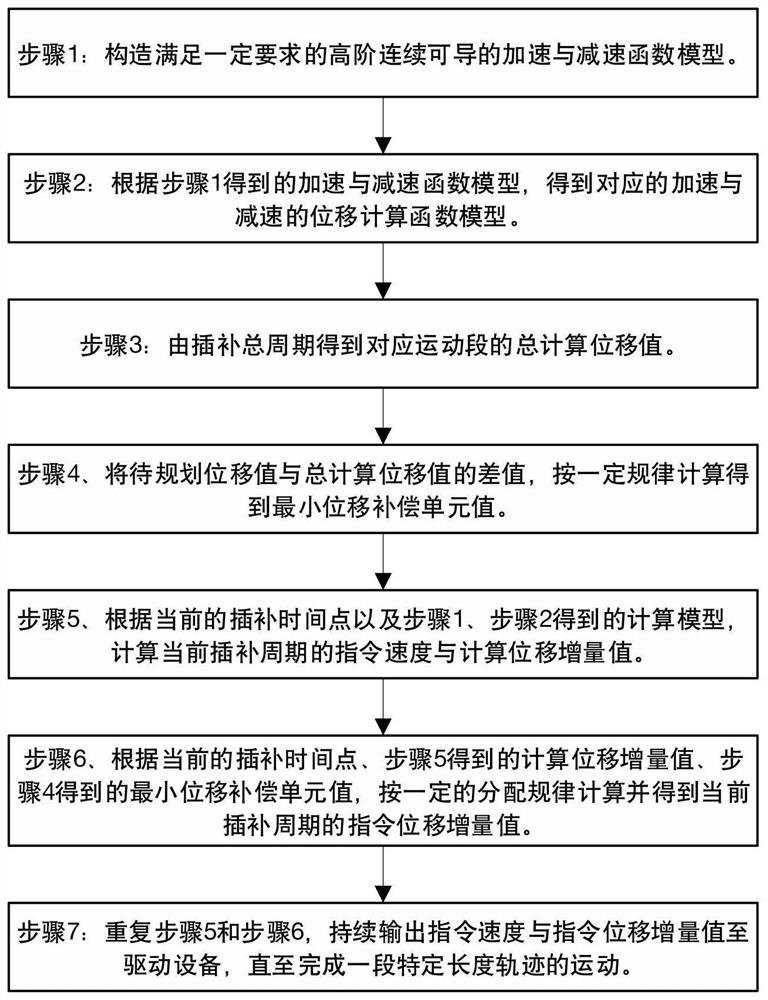
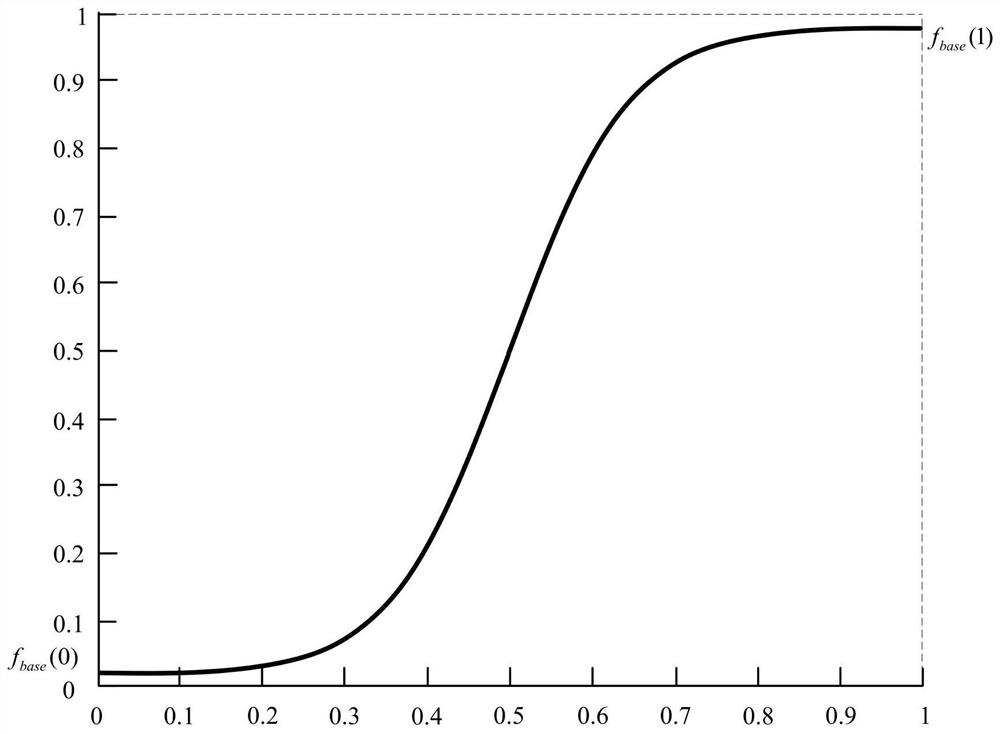
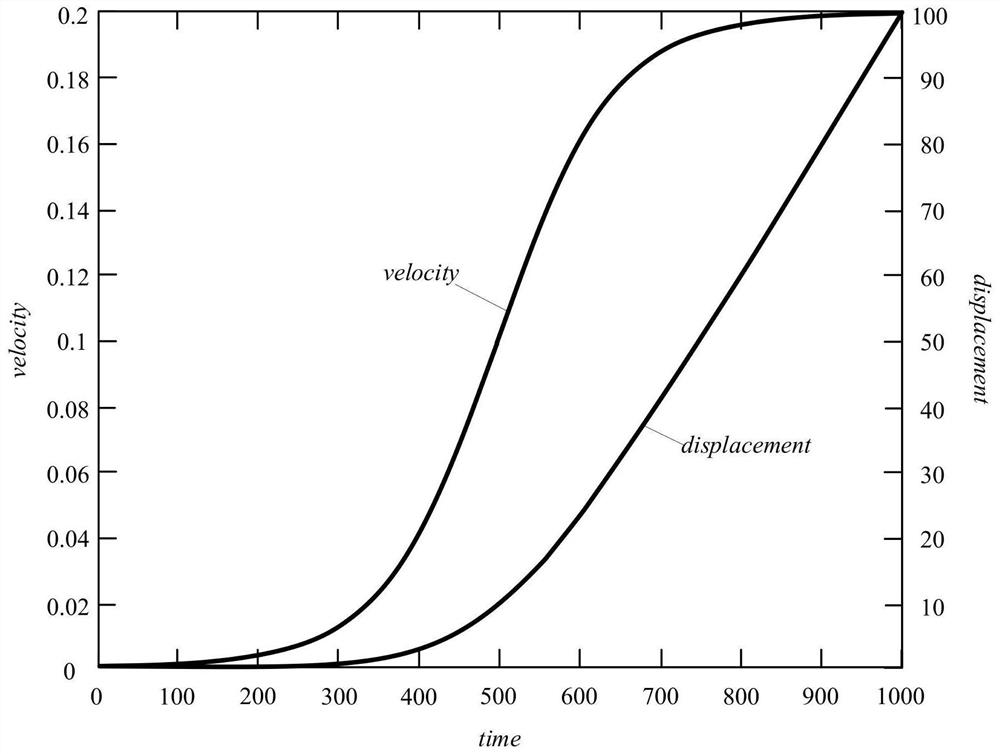
[0039] figure 1 Execution flow chart for the steps of the present invention, figure 2 It is a schematic diagram of the basic speed curve and its basic parameters of the present invention, image 3 Be the speed, displacement curve figure in the embodiment of the present invention, Figure 4 Be the acceleration graph in the embodiment of the present invention, as figure 1 , figure 2 , image 3 and Figure 4 A flexible speed planning and displacement compensation method for laser cutting is shown, and its specific implementation includes the following steps:
[0040] Step 1.1, construct the acceleration and deceleration function model, and ensure that the two functions meet certain requirements, namely: domain x∈[0,1], value range y∈[0,1], first define the acceleration and deceleration basic functions: where a is a calculation constant.
[0041] Step 1.1.1, constructing the acceleration function model: the acceleration function model in step S1 adopts
[0042] Step 1...
Embodiment 2
[0083] figure 1 Execution flow chart for the steps of the present invention, figure 2 It is a schematic diagram of the basic speed curve and its basic parameters of the present invention, image 3 Be the speed, displacement curve figure in the embodiment of the present invention, Figure 4 Be the acceleration graph in the embodiment of the present invention, as figure 1 , figure 2 , image 3 and Figure 4 A flexible speed planning and displacement compensation method for laser cutting is shown, and its specific implementation includes the following steps:
[0084] Step 1.1, construct the acceleration and deceleration function model, and ensure that the two functions meet certain requirements, namely: domain x∈[0,1], value range y∈[0,1], first define the acceleration and deceleration basic functions: where a is a calculation constant.
[0085] Step 1.1.1, constructing the acceleration function model: the acceleration function model in step S1 adopts
[0086] Step 1...
Embodiment 3
[0127] figure 1 Execution flow chart for the steps of the present invention, figure 2 It is a schematic diagram of the basic speed curve and its basic parameters of the present invention, image 3 Be the speed, displacement curve figure in the embodiment of the present invention, Figure 4 Be the acceleration graph in the embodiment of the present invention, as figure 1 , figure 2 , image 3 and Figure 4 A flexible speed planning and displacement compensation method for laser cutting is shown, and its specific implementation also includes the following steps:
[0128] First, consider an accelerated motion process, assuming the initial velocity v s =0, the target speed v tar =0.2, the maximum acceleration A during the acceleration process a =0.0007, the displacement value S to be planned plan =100.
[0129] Step 1. Construct a high-order continuously differentiable acceleration and deceleration function model that meets certain requirements. Preferably, the accele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More