

Redundant degree-of-freedom robot brake release management method
An industrial robot, redundant technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of industrial robot collision, large end displacement, and large motion range of industrial robots, and achieve the effect of not easy to collide and good safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the purpose, technical solutions and advantages of the present invention clearer, the solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are the embodiment of the present invention Some examples but not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
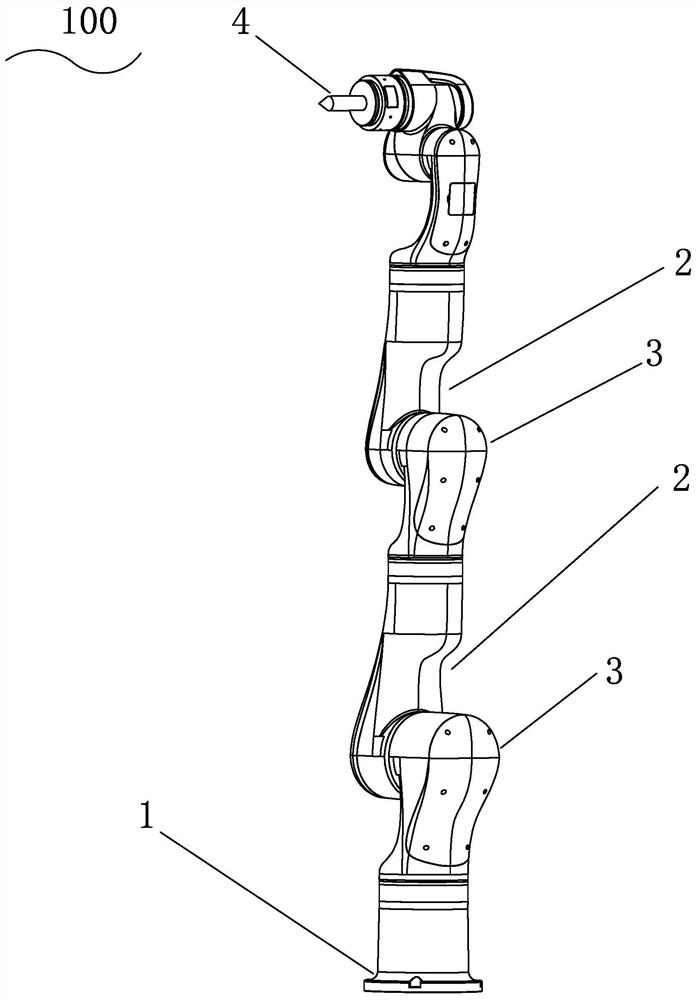
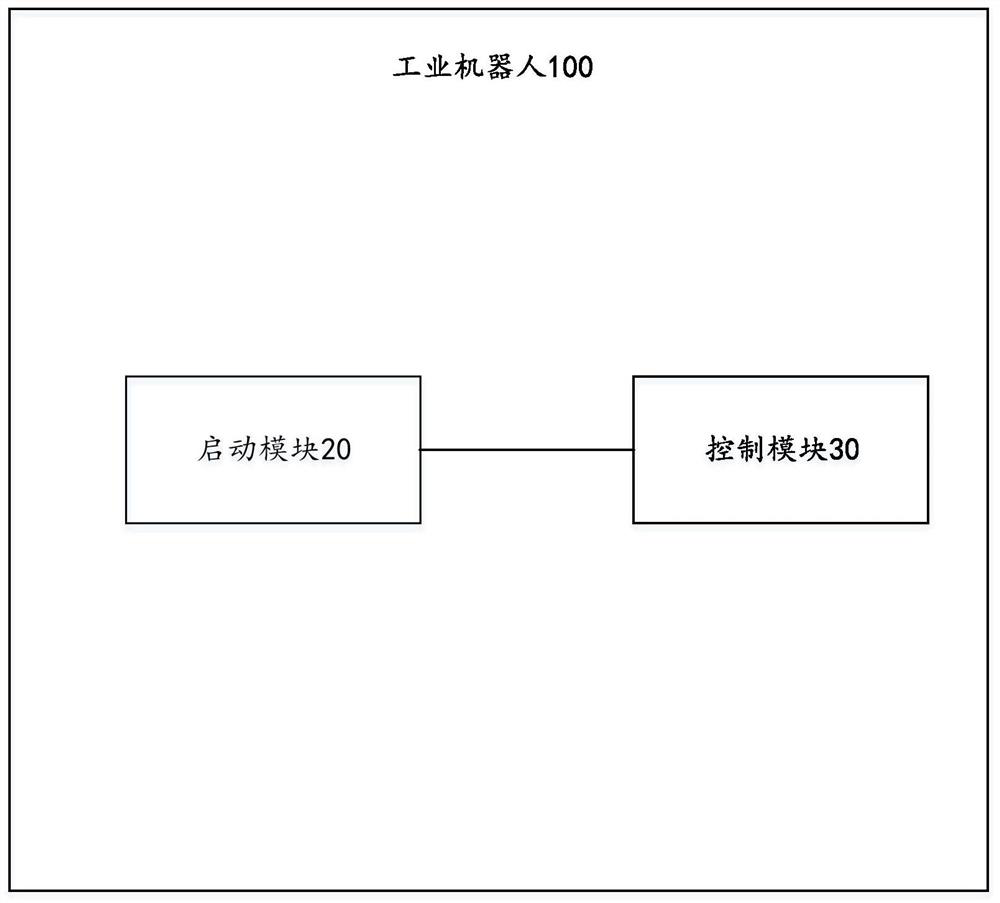
[0029] The invention protects an industrial robot, refer to Figure 1-2 , figure 1 A schematic diagram showing an industrial robot 100 according to an embodiment of the present invention, figure 2A block diagram of an industrial robot 100 according to one embodiment of the present invention is shown. Industrial robots can usually be divided into traditi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More