

Electric six-axis robot control system and control method based on TherCAT
A six-axis robot and control system technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of motion accuracy and corresponding speed effects, and achieve the effect of good data compatibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
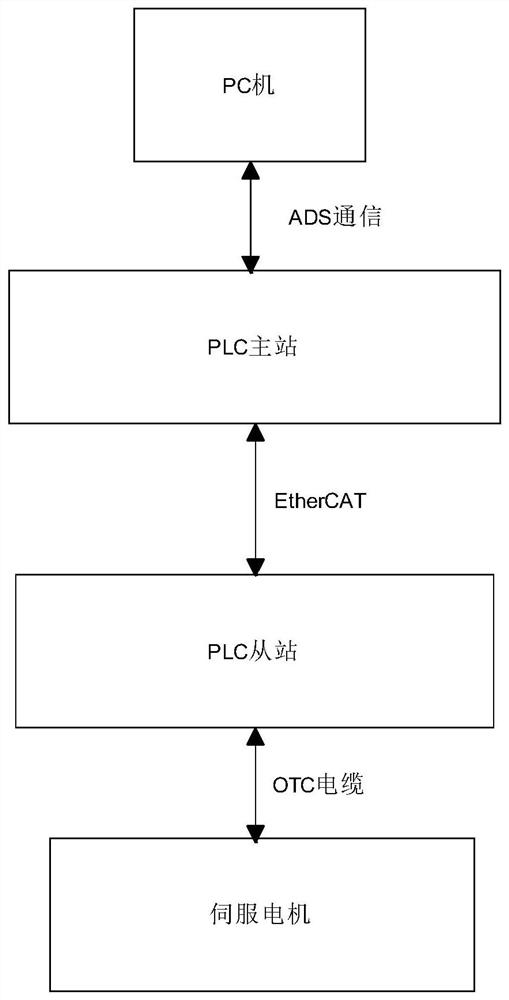
[0025] Such as Figure 1~2 Shown is a TherCAT-based electric six-axis robot control system, PC, PLC main control system, several indicator lights, several sensors, several servo motors, position feedback modules corresponding to the servo motors, and all six joints of the six-axis robot is a rotary joint, and the two joints are connected by a connecting rod. The six-axis robotic arm has high control precision, high safety and reliability, and can replace the operator in operations with a high risk factor. The end effector of the robot can be connected to different actuators to realize different functions of electrical work.
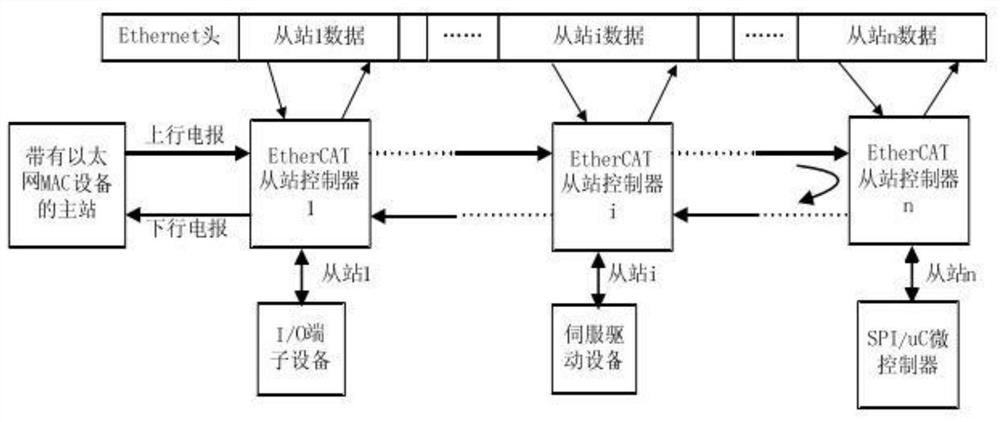
[0026] The PC performs data interaction with the PLC system through the ADS protocol, and the PLC main control system includes a PLC master station and several PLC slave stations, and EtherCAT is used for data interaction between the PLC master station and several PLC slave stations respectively. The PLC master station and the PLC slave station perform d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More