

An underwater manipulator
An underwater manipulator and manipulator technology, applied in the field of manipulators, can solve the problems of limited working range, high manufacturing cost, manipulator function and complex structure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
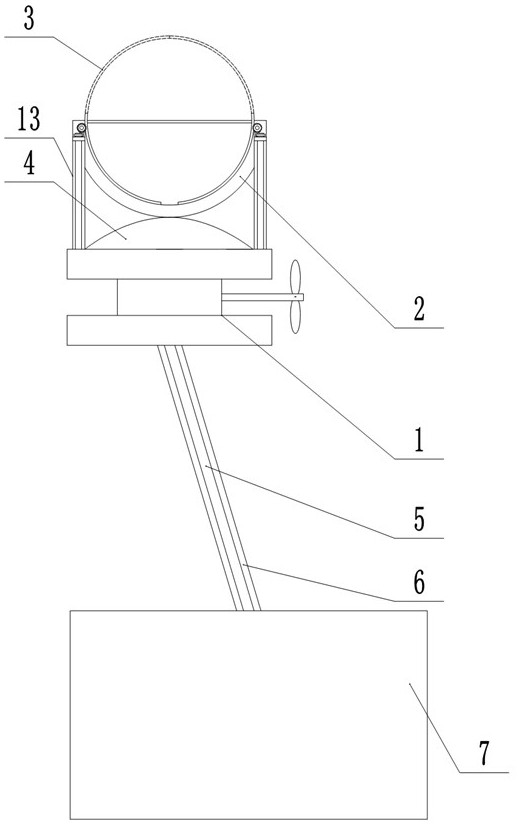
[0027] refer to Figure 1-3 , the present embodiment provides an underwater manipulator, including a mounting plate 1, the mounting plate 1 is connected with a lifting part for controlling the lifting of the mounting plate 1 and a driving part for controlling the horizontal movement of the mounting plate 1; one side of the mounting plate 1 A manipulator main body 2 is fixedly arranged, and a plurality of mechanical claws 3 are slidably connected inside the manipulator main body 2, and each mechanical claw 3 is controlled to rotate by a control unit. The present invention directly controls the lifting of the mounting plate 1 through the lifting part, and drives the mounting plate 1 to move in a certain plane in the water through the driving part, so that the manipulator can move freely within a specific range, so that it can move for a long distance and reduce the size of the water hull or The underwater robot 7 restricts it, and controls the mechanical claw 3 to slide inside t...
Embodiment 2
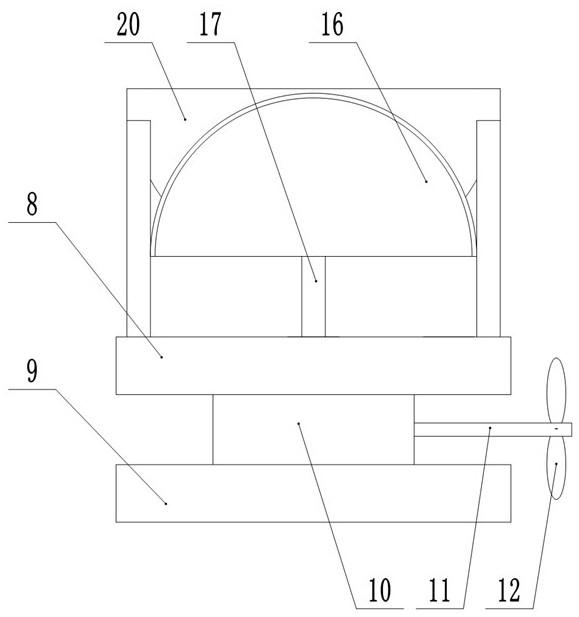
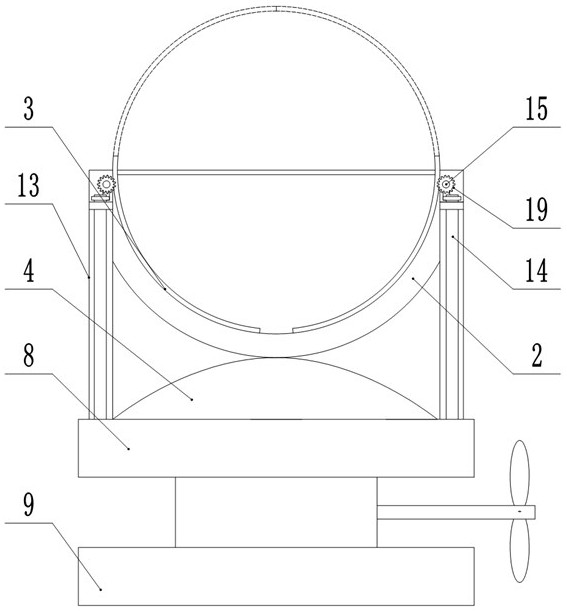
[0034] refer to Figure 4-5 , this embodiment provides an underwater manipulator. The difference between this embodiment and Embodiment 1 is that the main body of the manipulator 2 is a hollow hemispherical structure, and the mechanical claw 3 is a three-dimensional arc adapted to the hollow hemispherical structure of the manipulator main body 2. Shaped structure, present embodiment is suitable for grasping the article of approximation and spherical structure.
[0035] To further optimize the scheme, the three-dimensional arc of the mechanical claw 3 is a three-point structure, the first end point of the mechanical claw 3 is set at the uppermost part of the mechanical claw 3, and the second end point and the third end point of the mechanical claw 3 are both set at the bottom and at the bottom. The same horizontal line, which is similar to the pattern on the watermelon; the number of mechanical claws 3 is arranged in no less than three groups, and the distance between adjacent ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More