

Driver control system and method for relieving traffic jam, medium, equipment and application
A technology for driver control and traffic congestion, applied in traffic control systems, road vehicle traffic control systems, neural learning methods, etc., can solve problems such as traffic congestion without actual deployment, difficult to quantify effectively, and relative relationships are intricate, etc. Achieve the effect of facilitating system optimization iterations and improving the accuracy of the model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0063] Aiming at the problems existing in the prior art, the present invention provides a driver control system, method, medium, equipment and application for alleviating traffic jams. The present invention will be described in detail below in conjunction with the accompanying drawings.
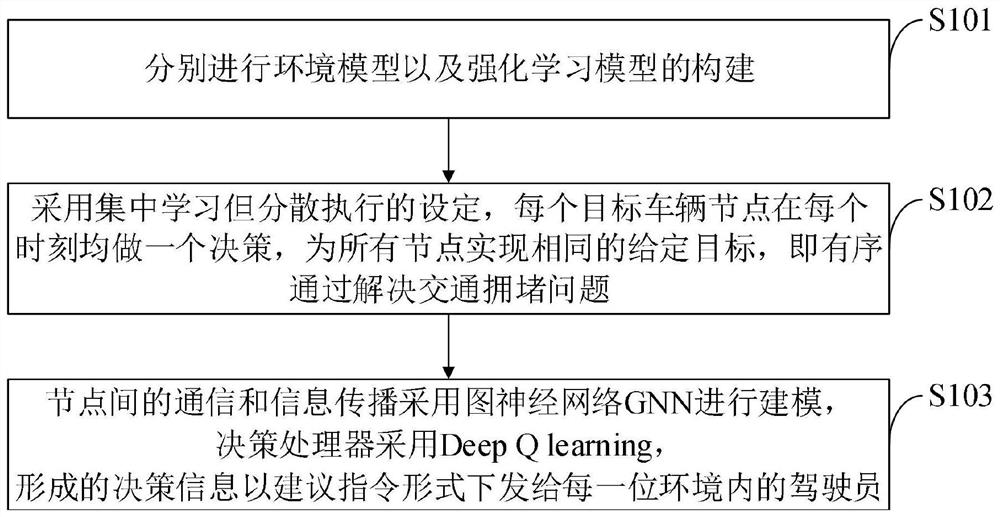
[0064] Such as figure 1 As shown, the driver control method for alleviating traffic jam provided by the embodiment of the present invention comprises the following steps:
[0065] S101, constructing an environment model and a reinforcement learning model respectively;
[0066] S102, using the setting of centralized learning but decentralize...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More