Human leg simulating structure for robot
A human-like and robot-like technology, applied in the field of human-like leg structure for robots, can solve the problems of poor leg structure flexibility and small degree of freedom, and achieve the effect of overcoming poor flexibility, convenient installation and operation, and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
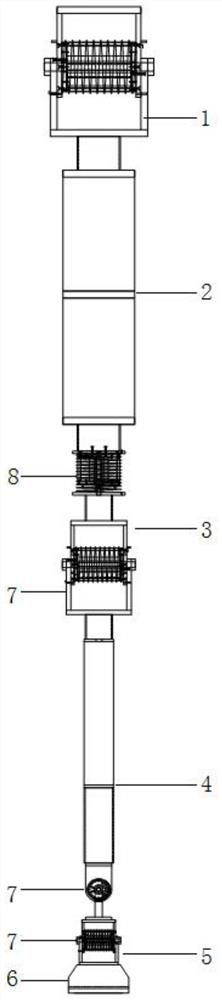
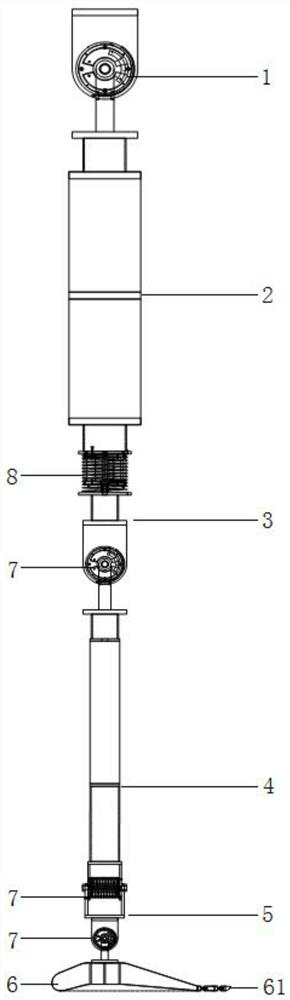
[0029] refer to Figure 1 to Figure 9 , the present invention is realized like this: a kind of robot uses imitation human body leg structure, it comprises the hip joint 1 that is connected in sequence from top to bottom, thigh 2, knee joint 3, calf 4, ankle joint 5 and Foot 6, the hip joint 1 includes a pneumatic joint 7 arranged horizontally and horizontally in the axial direction and used to drive the thigh 2 to carry out lifting movement; the knee joint 3 includes a swing mechanism 8 arranged vertically in the axial direction, and The bottom of the swing mechanism 8 is connected to the pneumatic joint 7 arranged axially and horizontally. The swing mechanism 8 is used to drive the lower leg 4 to swing to the left and right. The pneumatic joint 7 provided at the bottom of the swing mechanism 8 is used to drive the small The leg 4 performs lifting motion; the ankle joint 5 includes a pneumatic joint 7 arranged axially horizontally and longitudinally and used to drive the foot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com