

Adaptive preset performance trajectory tracking control method considering input quantization
A trajectory tracking and preset performance technology, applied in the direction of height or depth control, to achieve the effect of ensuring accuracy and simplifying the design calculation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0121] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them; based on this The embodiments in the invention, and all other embodiments obtained by persons of ordinary skill in the art without creative efforts, all belong to the scope of protection of the present invention.
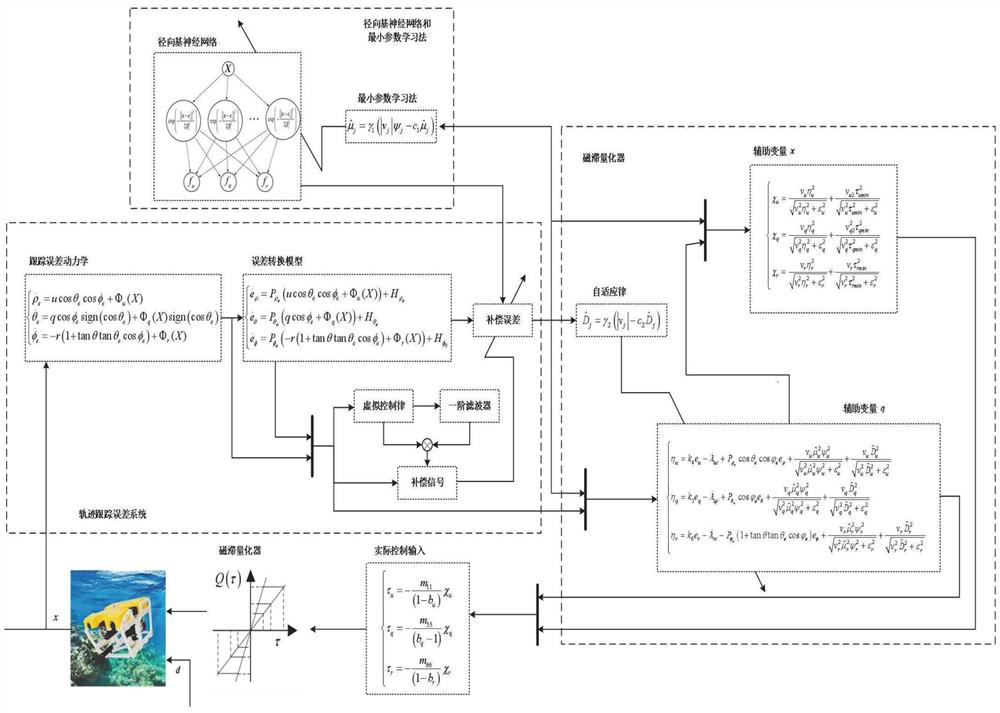
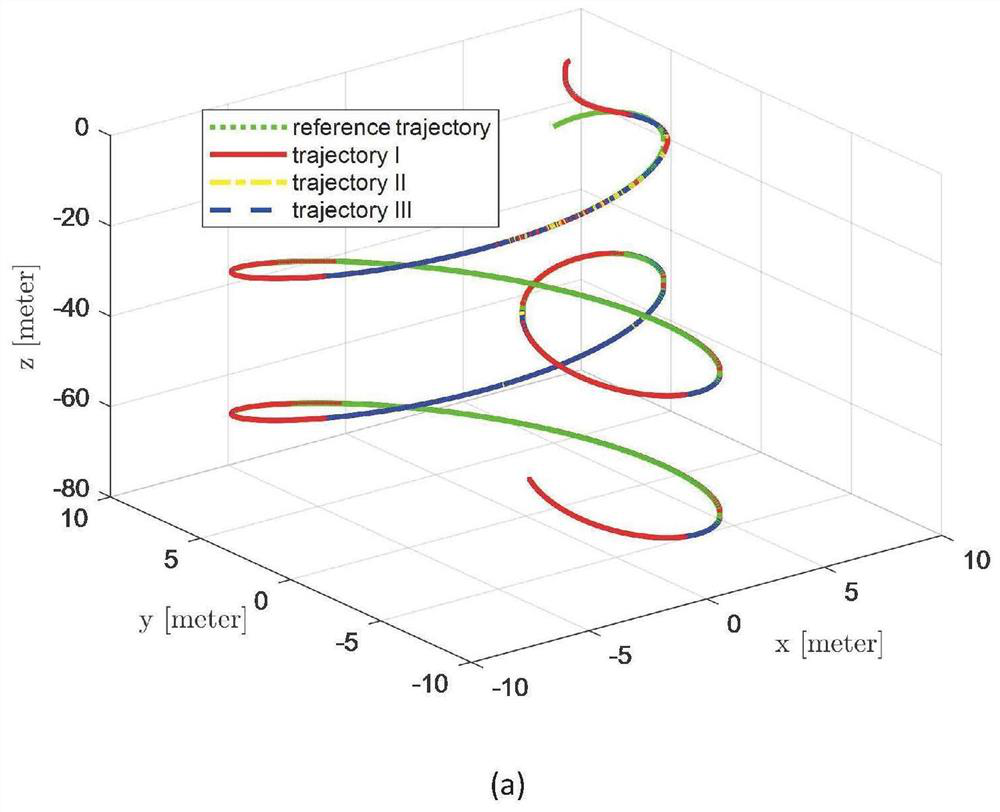
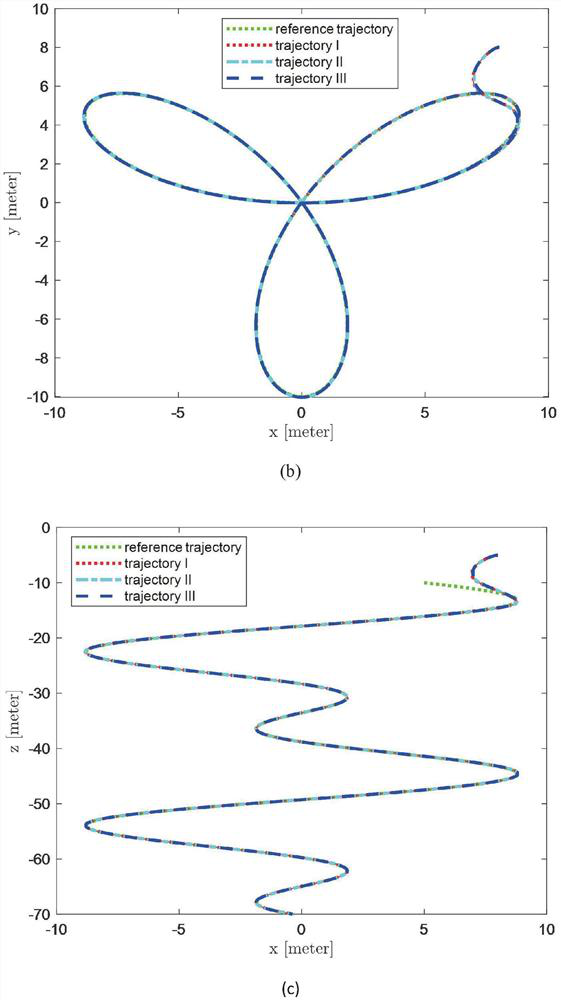
[0122] to combine Figure 1 to Figure 5 ;
[0123] An adaptive preset performance trajectory tracking control method considering input quantization:
[0124] The method comprises the steps of:
[0125] Step 1: Obtain the motion state information of the underactuated underwater vehicle through the sensor, and build a 5-degree-of-freedom mathematical model of the underactuated underwater vehicle. The mathematical model includes the kinematics and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More