

Digital twinning-based digging and anchoring all-in-one machine real-time state mapping method
A technology of real-time status and mapping method, applied in measurement devices, instruments, design optimization/simulation, etc., can solve problems such as accurate monitoring and real-time maintenance cannot be effectively solved, data is difficult to quickly analyze, and mobile unit information is difficult to collect in real-time. , to achieve the effect of real-time simulation of service environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be described in detail below, and the objectives and effects of the present invention will become apparent from the
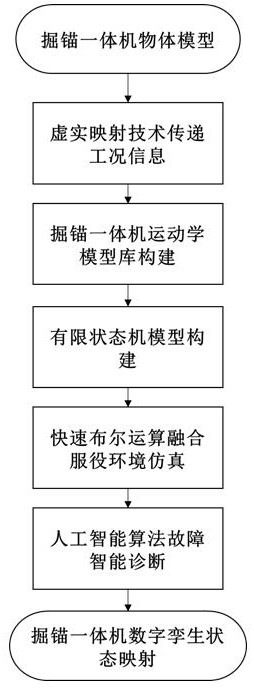
[0051]The present invention is a real-time state mapping method based on digital twin, the method first passes the data virtual and real-time mapping technology, and delivers the operating status information of the irig anchor unit; then based on geometric and sports model library build methods, exercise real-time simulation And through a limited state mechanism to build anchor integrated machine to raise, feed, excavation, etc. State mapping; figure 1 Indicated.
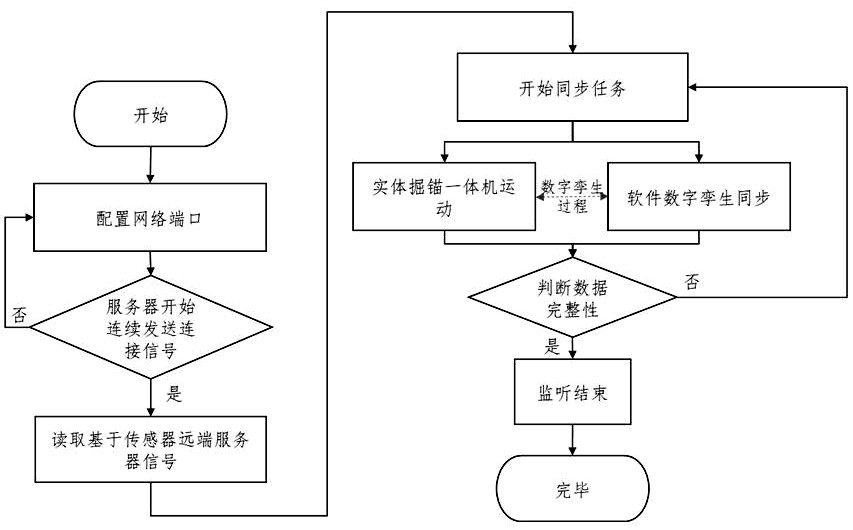
[0052] The data virtual real mapping technology includes the following steps:
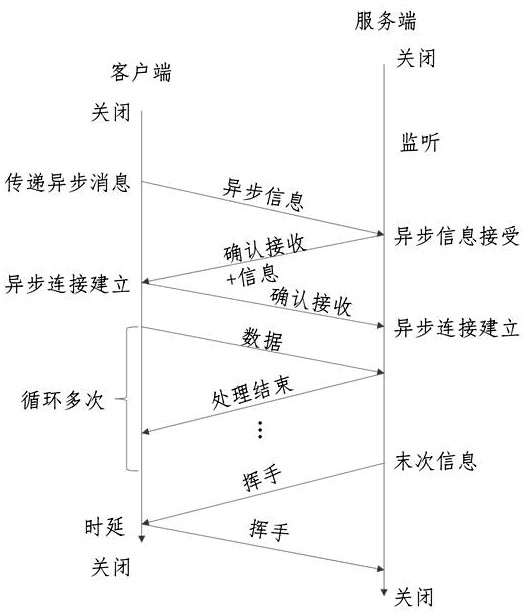
[0053] Such as figure 2 As shown, the network communication port is opened in the digital twin client of the irig anchor unit, and the actual irig anchor unit data acquisition monitoring system is set to the server, listen, and wait for the client connection. During the connection, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More